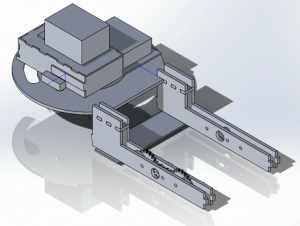
This week I helped with the assembly and setup for the interim demo, including doing some final laser cutting. I also was able to get the full gear system for a single arm put together, after some delays with the 3D print orders. I spent a lot of time trying to figure out why the stepper motor wasn’t being driven properly, which ended up being multiple reasons. The drive strength on the GPIO is pretty poor, and one of the Jetson’s PWM pins doesn’t work properly.
I am on schedule, and just need to redesign the battery housing since the orientation of the battery status window is on the wrong side. Other than that, I’m ready for assembly of the housing and testing of the lift arms. Based on initial results I may need to use larger gear ratios since the torque output is lower than I had hoped, but will try and alter the stepper config first. This will only impact the weight limit tests that we’ll do in a couple weeks.
In the next week I’ll try and improve the lift arm strength and remake components if needed, followed by a full glue-up of the electronics shield. I’ll also start making the bin modifications so we can begin weight testing. Once that’s done, I’ll begin moving over to the software side and assist there.
I’ve run validation tests on the lift arms and gear systems so far, which will allow me to start doing higher weight verification tests up to 10lbs. After the bins get made this week, I’ll be able to verify stability of the bin lift to meet the 99% no-tip target. Those are the only tests I have that are strictly hardware-related, and the other ones will be integration tests with the software side. I’ll work closely with Jack and George on those tests and the associated metrics.
https://github.com/gxgao/eceCapstone/blob/master/lift_test1.py