
Significant Risks
- Navigation Stack compiles and runs, still working on tuning configuration parameters and sensor data for more accurate results with path planning and movement, but made progress, found crucial bug that treated odom frame as a static transform w.r.t the world.
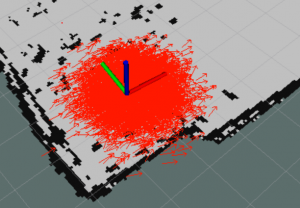
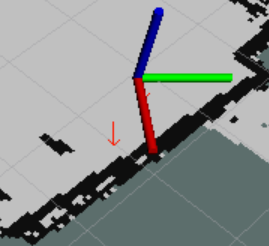
- Localization is better, but still has a lot of drift
- An example of starting pos vs ending pos for point cloud array for localization
- The preliminary stepper config results in lower-than-expected torque
- Map update / Control loop update rate has been decreased significantly due to hardware limitations
Design Changes
- Nothing concrete on hardware, but consider looking at higher gear ratios or more powerful stepper motors to reach 10lb lift target (based on initial test)
- None on software side
Schedule/PM
- Still behind on test/integration, will be making use of 1 week slack time