
This week I was able to CAD the mounting plate for our lift arms, and the lift arms themselves are in progress and will be done tomorrow. I tried to design them for high load capacity, since I’m not too sure about the strength of plywood. I also worked on some of the drive code using the pyCreate2 API, since that’s what we’ll be using for the full system, and supported making our first map of HH 1307. roomba_v1.py
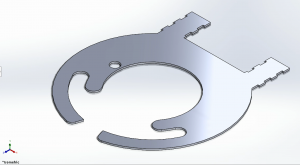

I’m still a little behind schedule with the CAD, but have been making good progress to catch up. I’ll be working hard to iterate the design if needed, but the CAD models for the arms are simpler than the top, which should help. Assembly will be rather quick as well, since I’m designing with notches and slots that fit well together.
This week’s target is to have bin docking done, which will be on schedule if I can complete the bin arms in the first half or two-thirds of the week. Not sure if docking will be able to occur using CV, but I can always test with a remote connection to the Jetson to make sure all mechanisms are working.