
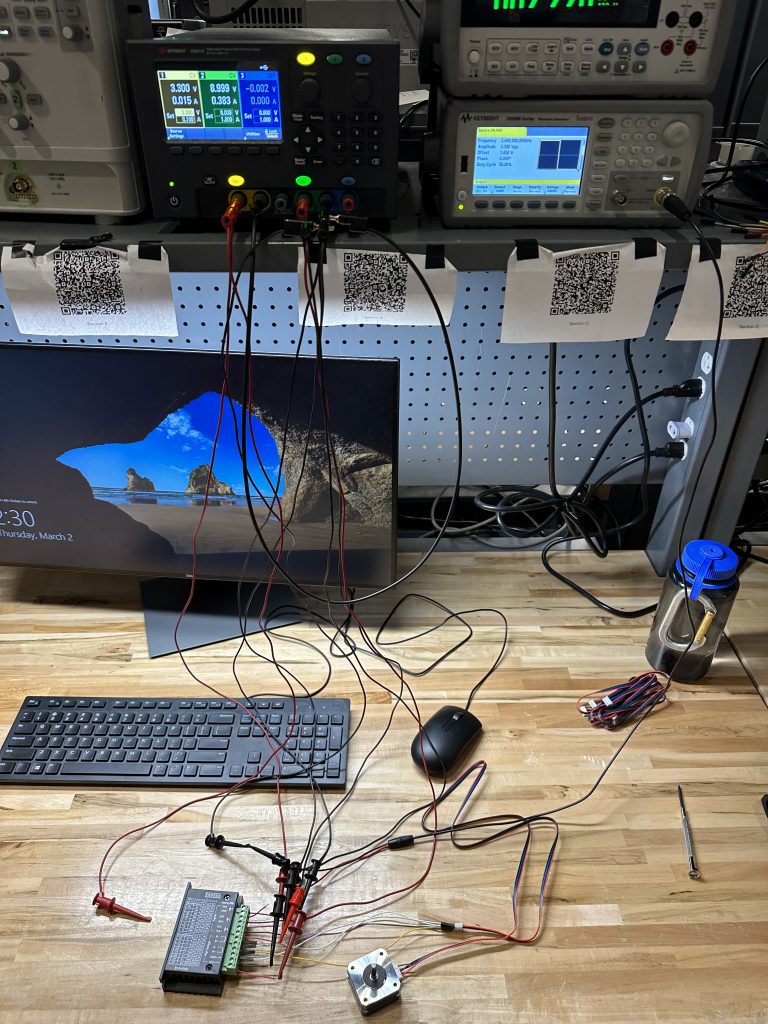
This week I spent most of my time on the design report linked below, since we wanted to make it quite thorough. That took more time than expected due to Google docs formatting issues. I benchmarked the stepper motor’s current draw and best pulse frequency across various micro step configurations. I also created the CAD model for the cam for the lift system.

I’m still slightly behind on CAD modeling and fabrication, but slack time this week and having the design report complete will allow me to get everything made. It was also tough because I wasn’t in Pittsburgh for break so couldn’t prototype designs in TechSpark.
This upcoming week I will be spending a lot of time in TechSpark getting parts laser-cut and start assembling onto the Roomba. There could be delays here based on fastener availability, but I can find quick, temporary workarounds for those to allow for rapid prototyping.