What did you personally accomplish this week on the project? Give files or photos that demonstrate your progress.
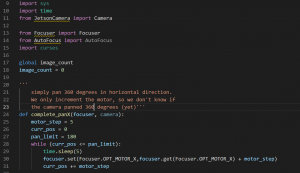
I was able to complete a couple of tasks this week. The first, and most important was the physical setup of the robot. I was able to finish all of this task, except for fixing the camera tower to the tripod. This task involved creating a 3 layered tower (camera, jetson nano, camera) where the cameras are screwed in and able to scan their full range of motion.
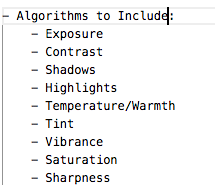
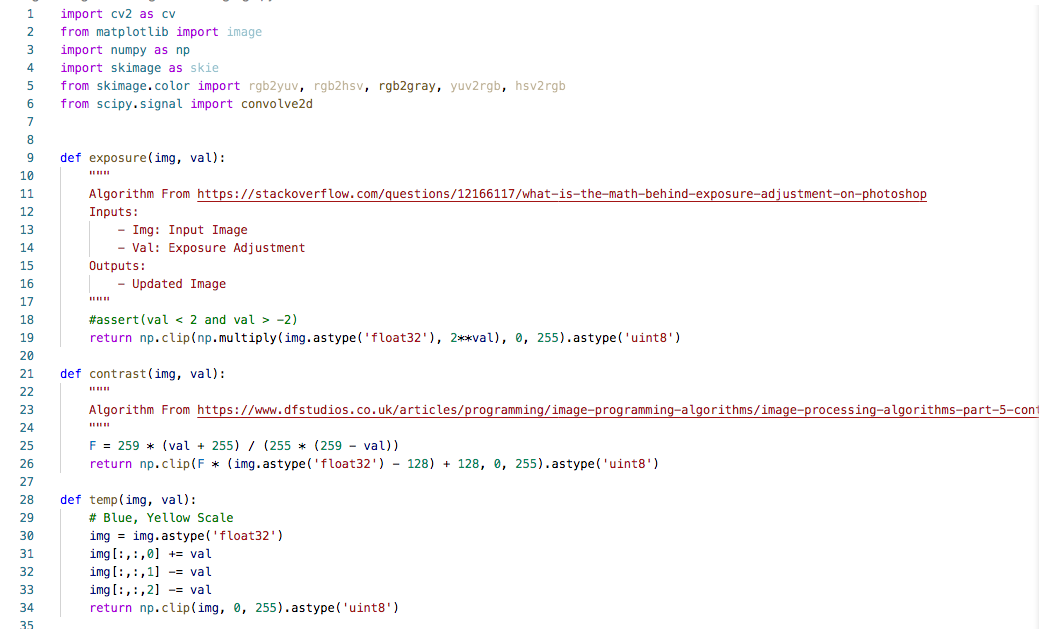
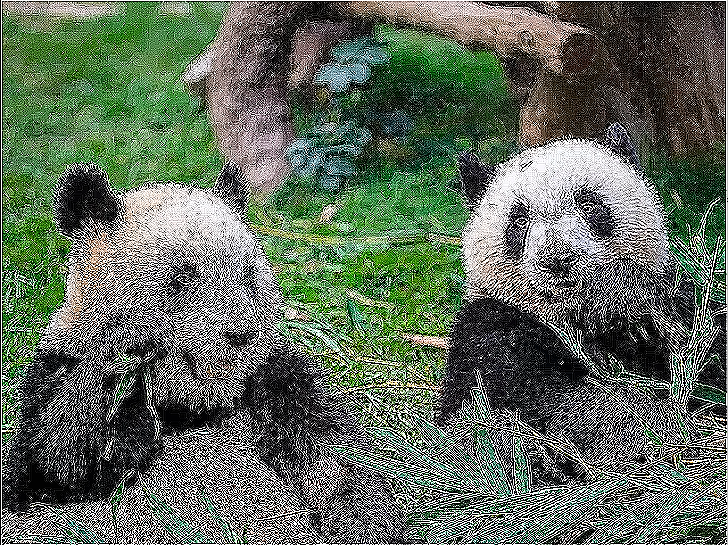
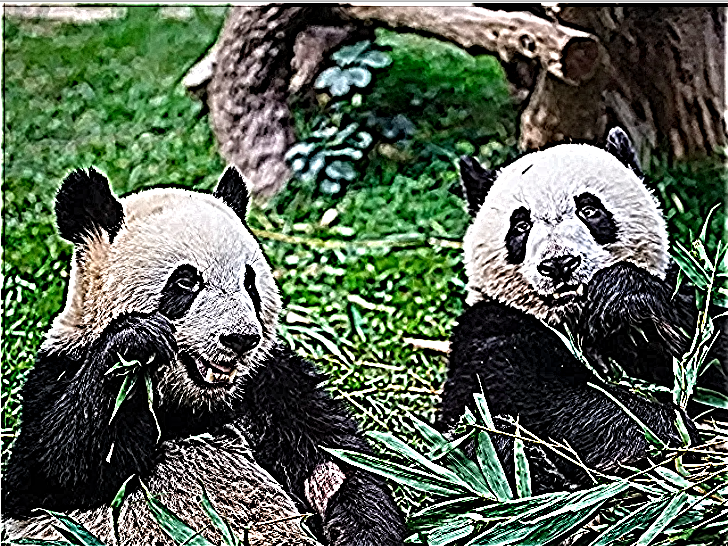
The next task I completed was updating the sharpening algorithm. We plan on having an algorithm automatically determine the number of effects to apply to our photos. With this in mind, it is important that the scales for applying the image processing algorithms in our library are natural and allow for enough flexibility. Our initial implementation of the ‘Sharpening’ algorithm would apply a single kernel one time for each level of sharpening. By the second or third iteration, the picture was unusable. This leaves very little flexibility in applying this effect. After research, I changed the algorithm such that the amount of sharpening is the size of the sharpening kernel. This led to a much more natural sharpening scale.
I also did the ethics reading and assignment this week.
Is your progress on schedule or behind? If you are behind, what actions will be taken to catch up to the project schedule?
We are on schedule with the Gantt chart shown in the design review and still have an excess of slack. We will test our first design this upcoming week.
What deliverables do you hope to complete in the next week?
Initial testing results for the robot’s search/detection and the editing algorithm.