
Last week:
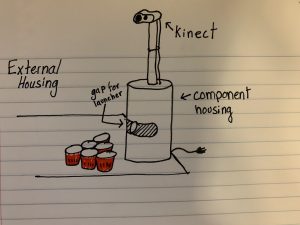
Last week I spent a lot of time going through different launcher ideas with JP. As mentioned in our weekly report, we settled on a non-motorized version for our initial testing. Conveniently, ping pong balls fit perfectly in cardboard paper towel rolls so that will be a good way to rapidly get this prototype into being. I also found an online guide with some example code for driving a micro-stepping motor and ordered those parts as well as a DC motor and bridge to drive that. I also did the design sketches for the launching mechanism we agreed to and of an initial idea for the final housing. Once I get the parts in hand, I can add those screw measurements and motor dimensions to the 3D model for the rotator mount and get that fabricated.

This week:
My tasks for this week are to build the stepper and DC motor circuits and to model the mounts for them. I also will mock up the launching mechanism with cardboard and finally get to test the exit velocity of the new DC motor.