
I spent this week finalizing the calibration process for detecting cup locations. I reorganized the repo to include Juan’s UI and and its dependencies, along with all of our external libraries. The calibration tool can now take a picture of a mat with the circle locations of a set of cups drawn on it, then calibrate the ellipse detector by mapping each circle location to the index of the cup it represents. This mapping of indexes to 2D coordinates is then saved in a JSON file so that the Automatic Gentleman can load this data in when it boots up. When the bot first takes a picture of the cup rack, it will compare the 2D coordinates of each detected ellipse with the calibrated data and map each detected ellipse to its correct index. Then the game will be able to communicate which cups to display to our UI.
Example calibration map (hand drawn for testing purposes):
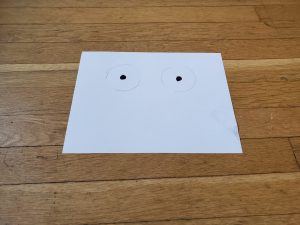
Example Calibration Data: