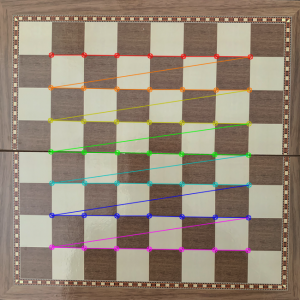
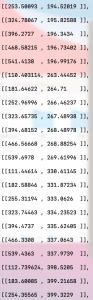
This week I have have looked into getting the coordinates of the corners as well as using the background subtractor. As for the corners, I have found that most of them have values from 0-500, but I realized the values might be pointless without coordinating it with the camera. Hence, I have decided to work on the background subtractor first, see if the camera can recognize the moves, and come back to coordinating the whole steps together. For the background subtractor, I was able to use it on my own webcam on my own video, but I was not able to use it for our purpose, which is comparing two frames to see which coordinates are moving. This was particularly hard for me as I was working remotely in Korea and did not have access to the chessboard with me to take a video. However, I have requested these to Jeewoong and he was able to take some pictures which I will get working on next week.


As for the schedule, I am on schedule with the initially planned schedule. I might not be next week though because I am switching up some tasks in the future weeks.
Next week, I am going to try to figure out using the background subtractor on two frames and getting to see if it is able to recognize the coordinates of which piece moved correctly. If this is successful, I will get working on detecting the corners correctly so I can get started on the move detection as a whole. There might be more steps than just getting the computer vision to work properly since our team is planning on getting each of tiles set up correctly and the location of pieces set up correctly. Hence, I want to finish the CV part quickly so I can get started on that.