Carlos Weekly Report
This week I worked on setting up the demo and integrating the range sensor code with Zeyi and Zehong’s pipelines. I also worked on the viability of altering our design to include two forward facing range sensors.
To measure the viability of altering our design to include 2 forward facing sensors, I decided to create a model of what a single range sensor is capable of doing. This involved doing the trigonometry to solve for the distance of the field of view of the sensor at varying distances. My results are as follows, at a range of 1.3m, the sensor is able to detect objects with a width of 0.3m. At distances between 1m and 0.5m, the sensor is able to detect objects with a minimum width of 0.075m to .15m. I will have a more detailed derivation of this in the report, but I wanted to log it here first.
Because of the results above, I have come to the conclusion that there is no need for two forward facing sensors for the following reasons. Here are the reasons why I came to this conclusion. First, we will mainly be detecting obstacles such as human legs, other Roombas, and walls which are a minimum of 15cm wide. From a distance of 1.8m, the field of view of the range sensor is about 0.3m across. As it gets closer to 0.5m, the field of view becomes 0.1m. After some thorough testing, the range sensor is able to distinguish these objects and return their corresponding distance. Since these objects are similar to what we will encounter with the Roomba in practice, it is an experiment which needs to succeed in order for our project to succeed. This is what I plan on showing in the demo.
The demo is going to demonstrate how consistently the sensor detects objects of varying widths even if those widths are smaller than the field of view.

The image above shows the 3 items that will be tested. First the dark box on the left measuring 26cm will be detected. Next, the white box on the left measuring 8cm will be detected. Lastly, the wall itself will be detected. The reason for testing these 3 items is that they are a close match to the objects we will be encountering such as a human leg, another Roomba, and a wall.
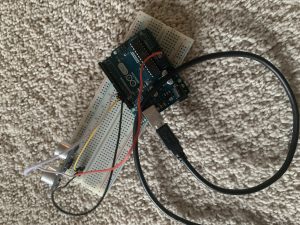
The image above shows the wiring for the demo. The range sensor communicates via i2c so it has a data line, a clock line, voltage, and ground.