Skip to content
Progress
Prepared design presentation slides
Tested metrics for vehicles, detection latencies, communication latencies, and some computation latencies
Practiced design presentation slides, presentation, potential questions
Started codebase for detection and path planning integration
Created classes for vehicle and track info
Worked on design report
TODO
Implement scheduling algorithm to ensure fairness
Just going to be keeping a counter for how long car is waiting without progress. System will choose the vehicle that has been waiting the longest to pass through the center lane
Test vehicles to correlate numerical values that we use to program the motors with actual speeds in cm/sec
Consolidated design specifications such as maximum vehicle control latency based on worst case scenarios.
Measured average-case performance of object detection algorithm. It processes approximately 28 fps.
Wrote design report/ design presentation
Design Presentation
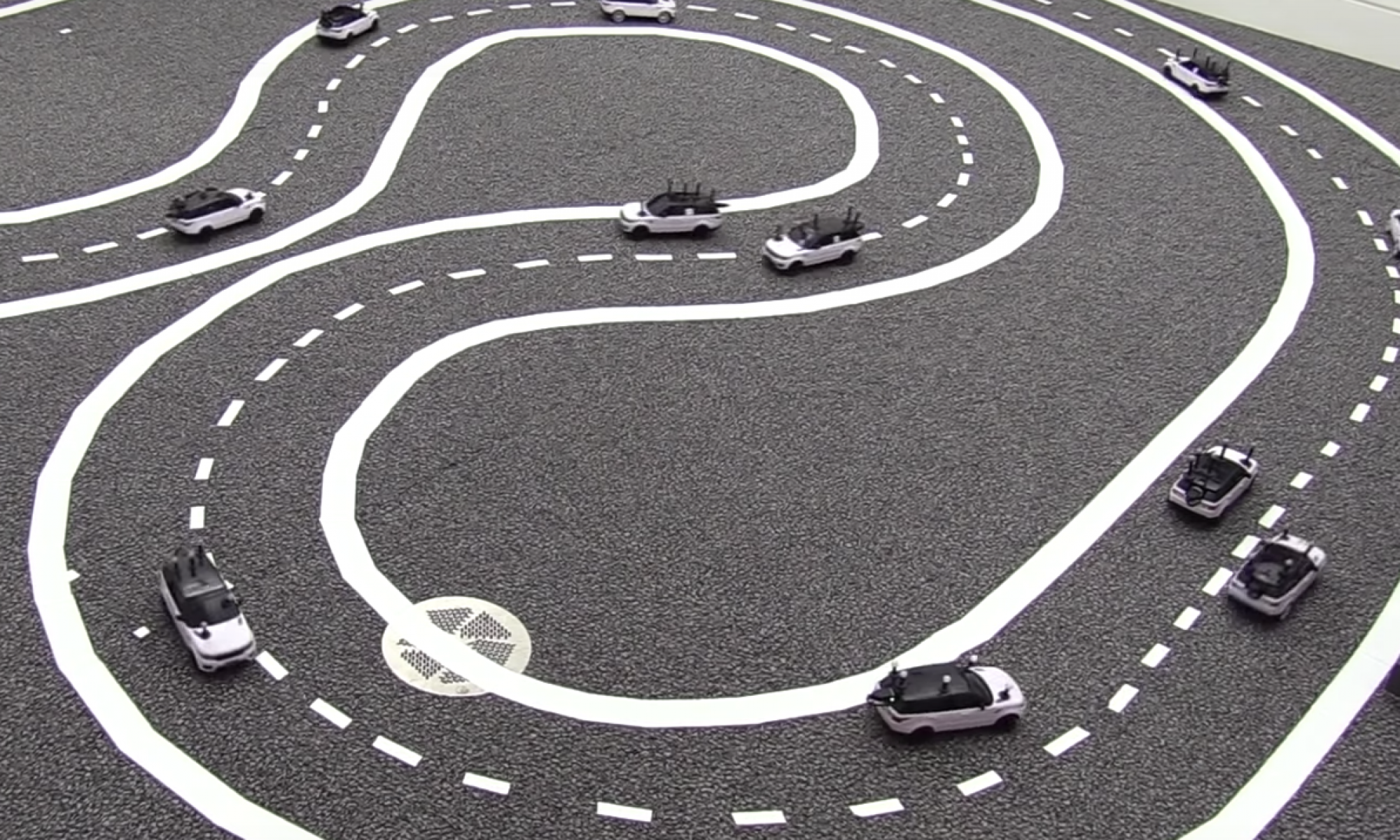
Measured out length, width, radius, etc. of figure-8 track
Built sample version of track through tape
Measured ideal camera height above track (in order to view the whole track within a frame)
Finished basic server communication code and tested communication latencies for sending different types of data (strings vs bytes)
Decided on granularity of speeds to send over to optimize the communication vs. information tradeoffs
Created integrated code base for detection and path planning
Created vehicle and track classes
Completed design presentation
Design Report
Consolidated design specifications such as maximum vehicle control latency.
Ran tests on our vehicles to get metrics on speed, communication latencies, etc.
Ran tests on camera detection and tags to get maximum frames per second that the code can process
Completed design report
TODO:
Fix power issue in circuit to get vehicles running
Test camera detection on running vehicles with tags to ensure accuracy
Test vehicles to create correspondence between numerical value programmed with actual vehicle speeds in cm/sec