- Connected graphics code to path planning code
- Redesign classes to be more modular and compatible
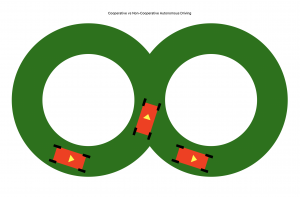
- Made adding vehicles on the track customizable
- User can click anywhere on the track and have a car oriented appropriately
- Added information at the bottom of the screen for future reference
- Implemented simple non-cooperative and cooperative path planning algorithm
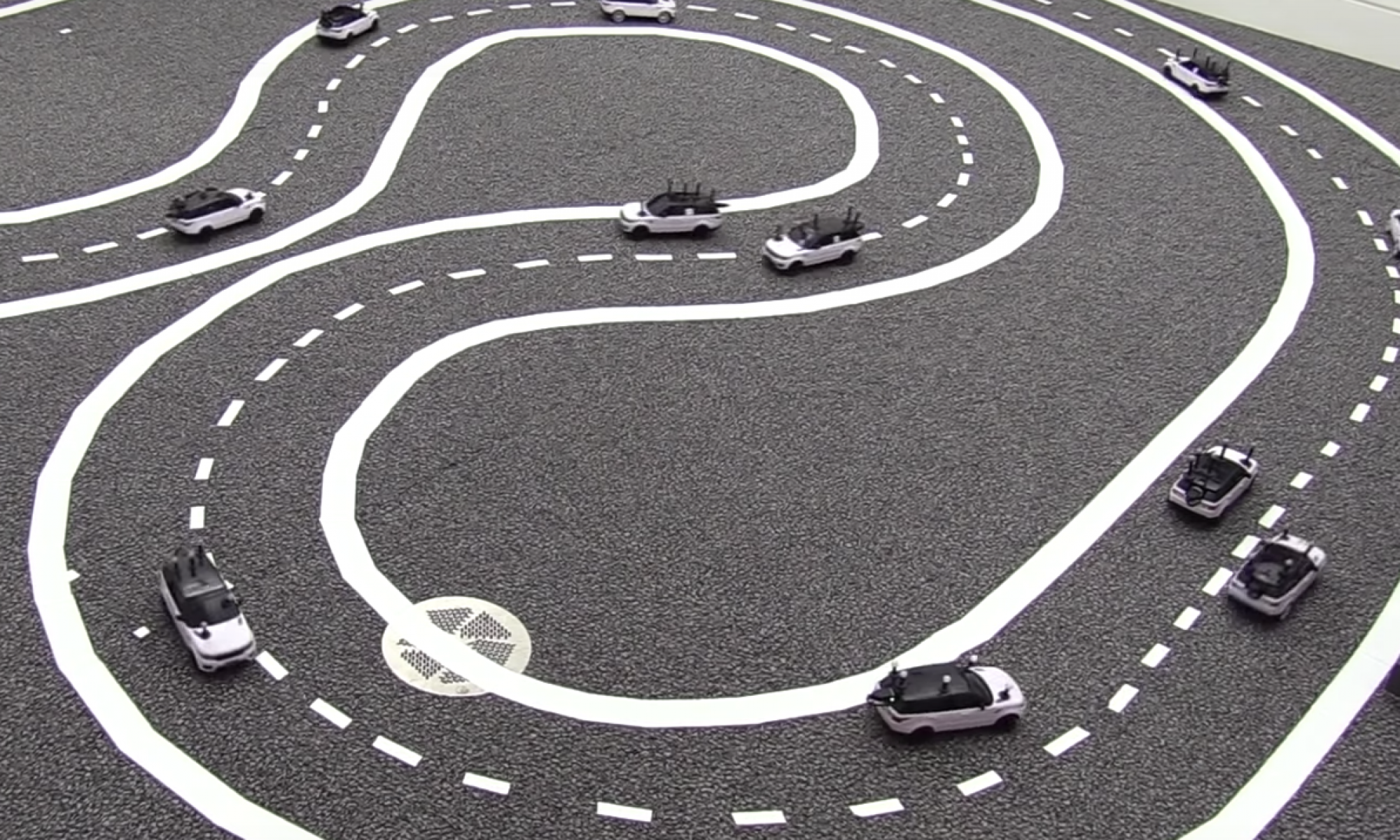
- Discussed alternative track configurations to explore
Updated Risk Management Plan
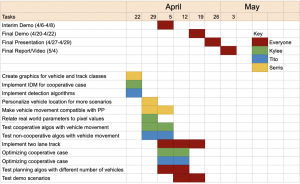
Having completed simple graphics and path planning algorithms, our upcoming tasks will be primarily optimization, enhancing our graphics, and possibly implementing another track design. In terms of optimization, the potential risks are that the cooperative approach simply does not see a significant increase in throughput compared to the non-cooperative case. This might be explained by the simplicity of the one lane figure-8 track design. And therefore, we would need to experiment with other designs where the difference might be more noticeable, specifically a two-lane approach. In addition to another design, we were considering displaying each vehicle’s decision making data to highlight the differences between approaches. We thought this would be more informative than just the visual of the vehicles moving along the track. Because we have gotten a good head start on the figure-8 track, we should be able to determine results within the next week, giving us plenty of time to implement another design with added complexity. Furthermore, while Tito and Kylee will be experimenting with fine-tuning parameters, Serris will continue to update the graphics to provide a more informative and maybe interactive report of the system.