
Haohan Shi
This week I was working on setting up the object detection on Raspberry Pi using openCV, the building process takes an extremely long time than expected. It took the raspberry pi around 1.5 hours to build on 4 cores with increased swap size and the build failed 3-4 times due to race condition. Thus I had to rerun the build several times and it caused the SD card to be corrupted.
Using a swapfile this large will allow the operating system to (potentially) run rampart writes to your SD card. Which is bad for a flash-based storage as it’s more prone to corrupting your SD card/filesystem. (link)
I have purchased a new SD card but I need to re-install all our previous system library and setup, also, some of my test scripts for object detection is also lost. I plan to first recover all our previous setup on the new SD card and try to build openCV using only 1 core with small swap size, but longer build time (~6 hours).
Olivia Xu
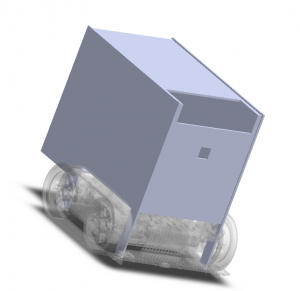
Done with first meobot box prototype. The mechanism is all parts slide together, with the two sides “clipping” onto each side of the robot body, and the front and back panels using extra extruded pieces to hold both sides together. Smallest body thickness is 0.3mm. I will be using Ultimaker 3 Extended printers in HH Makerspace. For the sake of time I chose 0.15 mm layer height. Total time 11 hours, 76 grams of plastic.
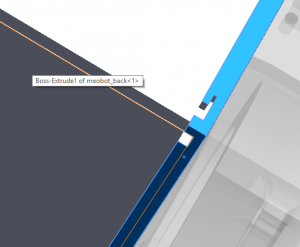
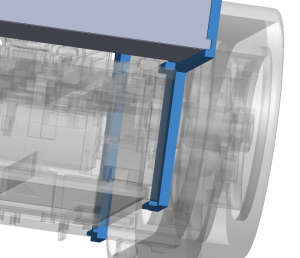
Carved out space for camera, LCD screen in “head” area (leaving head empty for now and 3D print & super glue later if this model works). Need to get the prints on Monday and see what fits and what doesn’t.
Yanying Zhu
This passing week I worked on the “following user” feature, which is basically an opposite algorithm of obstacle avoidance. Currently it works in a not so perfect way. Since is designed to recheck the state and distance of the obstacle ahead of it every computer cycle, it oscillates frequently when the obstacle moves. I am unsure how good it could end up, but I’m currently calibrating on the best turn speed. Another option is to redefine its behavior: it can face the user at first without moving, and then sprint to the user if the user stand still for a certain seconds.
The future schedule would be further polishing the movement of the robot. It’s also possible to add more features if we can come up with interesting ideas.
Team Status
Our moving and case design is still on the schedule this week, we already have our first version of the outer case so we can print out and test on next week. However, the main functionality of facial and object detection should be done this week, but due to the wasted long build time and corrupted SD card, the main functionality is pushed back to next week.
Our experience from this incident is always keeping several spare parts and backups on the project if possible. So far we have encountered Raspberry Pi failure, camera failure and this time SD card failure. Having backup component and setup will save lots of time if this kind of incident occurs.