This week, we finished: 1. integrate raspberry pi with Web app 2. Add final stop motion(wall encountered) to our entire program 3.demo in class
We coordinated with Yuhan on how raspberry pi and her website would interact. Raspberry pi now is always ready to accept messages from the web. User can setup alarm time and ringtone/song on our AWS website. When it is the scheduled time, the server will send this specified ringtone to our raspberry pi. Pi will parse the message, execute the shell command to wake the robot up, play the song, and run.
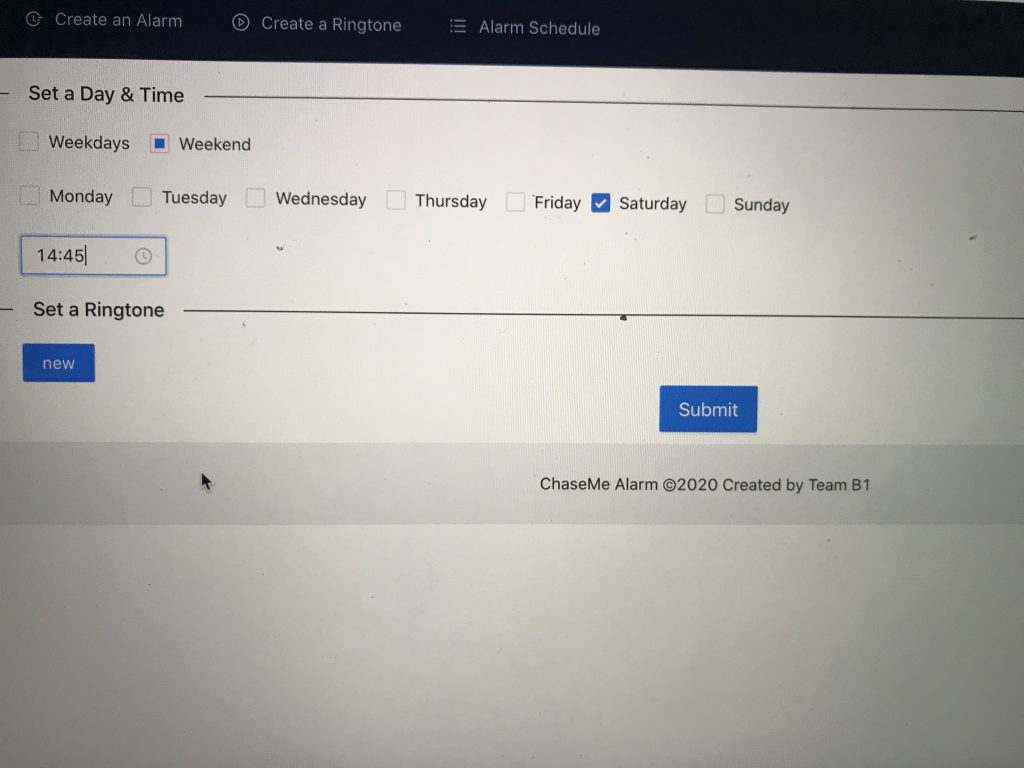
(set up time on web)
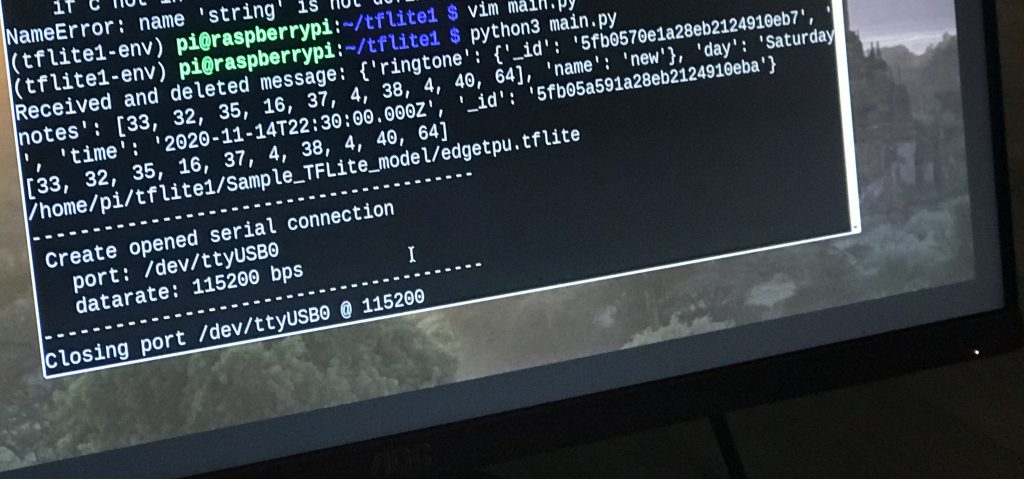
(received message from server)
This week we also integrated our “stop action” algorithm we developed last week to our main algorithm. Now, the robot is fully functional. On the hardware side, power bank for the raspberry pi we ordered was also delivered. Now pi can be fully mounted on top of the robot. We have not yet find a way to fix the camera in a better& more elegant manner.
Next week, we will start on testing, optimizing algorithms, and finding success rates.