
I was able to make significant progress this week. Firstly, I realized that I was incorrectly using the BRAM in the MicroBlaze and had to use a Block Memory Generator IP block, so I updated the block diagram to the following.
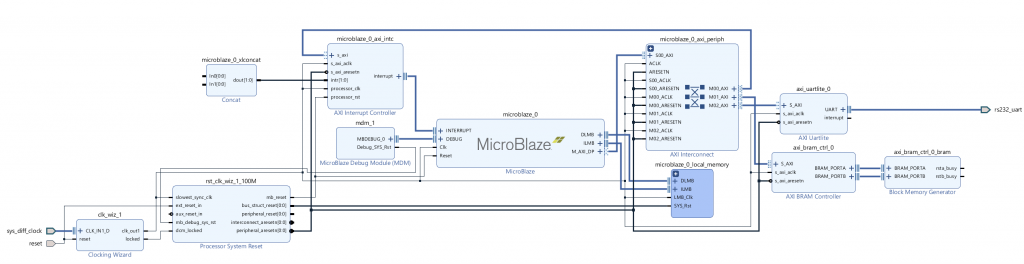
After learning how to use the IP block, I was able to effectively store the entire input image and allocate different portions of the BRAM for the various intermediate results that are generated as follows:

I then worked with Albert to fully convert the image processing Python code to an implementation that I could place on the MicroBlaze. I was able to synthesize an implementation that met our target baud rate and was able to meet timing by playing around with different configurations of the block design. As a result, I was able to have the FPGA take in an image such as the following

and return the coordinates as follows.

The UART.py file loads an image, downscales the image, converts it to HSV, and writes it to the FPGA serially, and then waits until it receives all of the coordinates. It is similar to the overall workflow and is ready to be integrated.
As mentioned last week, I am slightly behind schedule. The arrival time of the locations is slightly higher than our target requirement. I plan on optimizing this during the weeks allocated for the slack but also plan on investigating and trying to reduce the latency to our target the upcoming week. I also plan on working with Vishal and having the interface and communication between the FPGA and UI be fully completed by next week.