At the moment, our most significant risk to our project is going to be the integration of all our independent systems. We have been working on the pathfinding, displaying on the LCD, networking, and sensor detection all in isolation. With the demo occurring in two weeks, we will need to really focus on getting each system into a reasonably finalized state so that we can work on integration between all independent parts. This will also require a lot of joint time spent between the owners of each technology so that we can get each of the systems properly meshing.
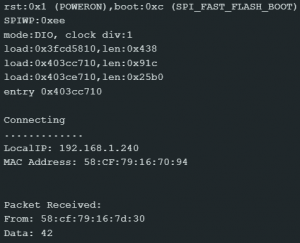
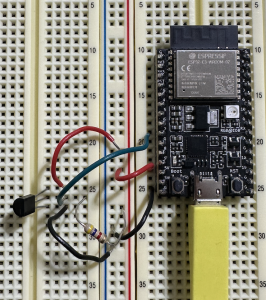
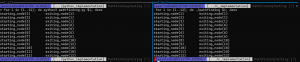
To try and mitigate this risk, we are doing our best to have each of our systems in a working state prior to this upcoming weekend to leave ourselves with at least a week to work on integration. This would require all of the sensors arriving quickly and being promptly tested, finalizing the pathfinding code and backup battery circuit, and being able to build graphs based on inputted floor plan examples. Currently, one of our biggest challenges is networking and being able to get our individual ESP32s to communicate with one another and show that we are properly being able to transmit and receive data. As our optimal path depends on smoke and temperature data from each individual node and being able to share this information amongst each other, we need to make this a priority. For the sake of our demo, we are just going to be using breadboards instead of the PCBs as we would want to test that our integration works before finalizing with a PCB. We realize that we have many complicated moving parts and we need to get working on integration as it will be pretty challenging especially with the initial demo coming up quickly. We will be spending a lot of time outside of the mandatory lab to work as a team to get these tasks done especially knowing that this week we don’t have our weekly professor/TA meetings and we are dedicating Wednesday’s mandatory lab to the ethics lecture and discussion section.
One of the biggest changes that we made to our design this week is that we have scaled down our design from using 10 nodes to using 7. We were running up against our budget and decided to return some of our parts to the ECE store to have some more flexibility in our budget. We feel that 7 nodes will still be enough to be able to demonstrate the path planning and other features that we are working on. Another design change that we are considering is switching from ordering PCBs to making our own. Because our PCBs are going to be fairly simple, we feel that we may be able to make these ourselves. This is something that we will be looking into.
While there are some places that we have fallen behind in our schedule, we have not decided to adjust these in our schedule because we are planning on making this progress up next week. We feel that our schedule is still feasible and that it allows us good pacing for our project.