At the beginning of this week, my team and I were focused on finishing our final presentation slides. Some of the information for these slides, we could draw from our last presentation, but we also wanted to focus on inserting the progress that we had made. For this, we made sure to include a video demo and photos of our current designs and working systems.
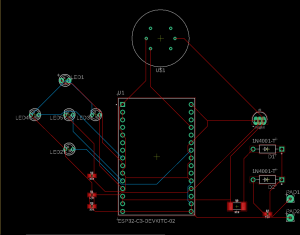
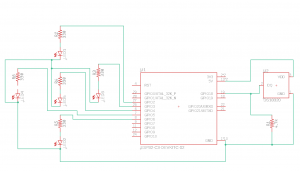
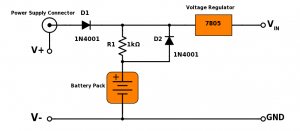
While we were putting these slides together, I noticed an issue with our PCB design. We had our ESP32 being powered directly through the power supply instead of through the battery charging circuit. We knew that this would cause problems, so Neha and I began figuring out a solution for this problem. On monday, I reworked our PCB design to fix this issue, as well as standardize all traces to be .3mm in width. After some final touches, we uploaded the design to JLCPCB and Quinn was able to place the order for us on Tuesday morning. This order was originally supposed to arrive on May 4th, which was a slight issue because the Techspark expo is on May 4th. This would mean that we would not be able to demonstrate our fully assembled node in the way we had hoped. To fix this, Neha and I went back to the PCB room in techspark to make another attempt at doing our own fabrication with our new design. While the fabrication seemed to go well, Neha did run into an issue when soldering our components onto the board: the PCB seemed to melt. I would guess that there must be some way around this issue, but the delivery date on the new PCBs was moved up to May 2nd, so we may be able to use these for the expo instead.
Another aspect of our project that I worked on this week was developing some code that would allow us to sleep our ESP32 to conserve battery power. After a little research, I was able to find that there was a fairly simple way to do this and it seemed to work. However, because our LCD display is powered by the same rails that the ESP32 is powered on, sleeping the ESP32 will not turn off the display. To remedy this, I did some research into the Nextion commands and found that I could send a command to the Nextion display to sleep the screen. After this, I wrote a couple of wrapper functions for this so that they could be called in our main function and this worked successfully. To test this, I set up a circuit that ran our display and an LED from the ESP32. I then attached a multimeter to the circuit to measure the power draw. When the display turned off, the current decreased from ~150mA to ~40mA and then when the ESP went into sleep mode, the current decreased even further to ~10mA. This test is shown in the video below:
https://youtube.com/shorts/vVrOd6ty3pc?feature=share
Currently, the PCBs are a little behind schedule. This is because we needed to reorder the PCBs. However, if they do come by the date that they say they will, we will be able to solder them and have them working by the techspark demo. If this is not the case, then we will plan on soldering our components into protoboards so that we still can still have compact, finished looking nodes. In terms of software, Jason and I split up the power sleeping and distributed pathfinding. I was able to get the power saving software to work so this fits well into our schedule. We also still need to complete our video and poster, but this will happen once we have our system finished.
In the upcoming week, one very vital thing for us to get done is the PCB assembly. As soon as the PCBs arrive, assembling one of these complete nodes will be Neha’s and my priority. Another thing that I am hoping to achieve is to integrate the power saving code with our current display/pathfinding integration. I don’t think this will be too much work, but it will be important to ensure that the delays caused by sleeping do not mess with our pathfinding algorithm and that we can turn off the power saving once a fire is detected.