Significant Risks:
- Docking Procedure may not be entirely robust
- Should be enough as an MVP and for majority of cases
- There may be edge cases where the system does not dock properly (next to a wall, in a corner, next to/under a table
- Arm lift may not hit the 10 lbs described, but can lift empty bin and possibly more for testing
- Battery bank is not going to last the desired five hours of runtime, but we do not consider this a major risk, as it does not change the functionality of the Robot
Design Changes:
- Added back rear facing camera for bin docking alignment
- The LiDAR didn’t provide enough depth differentiation of the bin when placed up against a wall, so alignment without a rear camera was difficult
- No changes have occurred on the hardware side since the last report
Schedule/PM
- Still slightly behind on test/integration, will be making use of finals week
- Hardware freeze will be occurring tomorrow since the bin lift system has been verified
- Components glued down and fixed in place for the final time
Testing:
- aRUco Identification test (success)
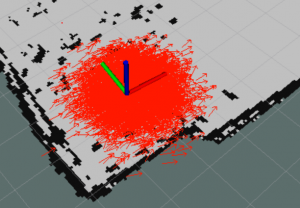
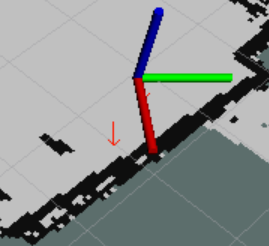
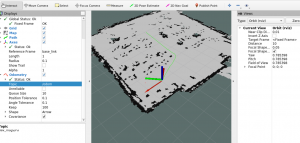
- Navstack Test (success)
- Bin lift test
- Basic lift without additional weight (success)
- 10lb lift (extrapolated for failure)
- Movement Speed Test (success)
- Human Collision Test (success)
- Preliminary bin alignment for bin docking subsystem test
- Changed design to include 2nd web cam after finding LiDAR object detection being unreliable
- More robust docking test with arms to lift bins are needed
- Integration testing left for next week after hardware freeze is done
- 2 Battery tests, one projected for failure, this weeks test showed 80% battery drainage over 4 hours. We ordered a new Roomba battery from last week, considering design changes for additional battery for battery bank.
- Testing results : https://docs.google.com/spreadsheets/d/1Fv7A8lMn3GBn9MV8tf394E4ilYxbIwjUDCy7U3aQ8g0/edit?usp=sharing