The past 2 weeks, including the Spring Break, had mainly two focuses. First one is to reorganize our team and get the design report written and submitted, and the second one is to order the parts and start building.
The design report was a big challenge for us. We stupidly ignored everyone’s advice on starting early, and left ourselves with barely enough time to finish the report. We did try our best to gather every piece of information we could on the parts chosen, and documented every step in coming up with our design. For the hardware part, I realize that we are missing information on the design trade-off studies. We are aware of that and we will not miss this critical part in our final report. The truth is, we messed up because we were all too busy with the sudden workload increase from multiple midterms, and we were focusing perhaps a little bit too much on actually building the device, rather than writing the report.
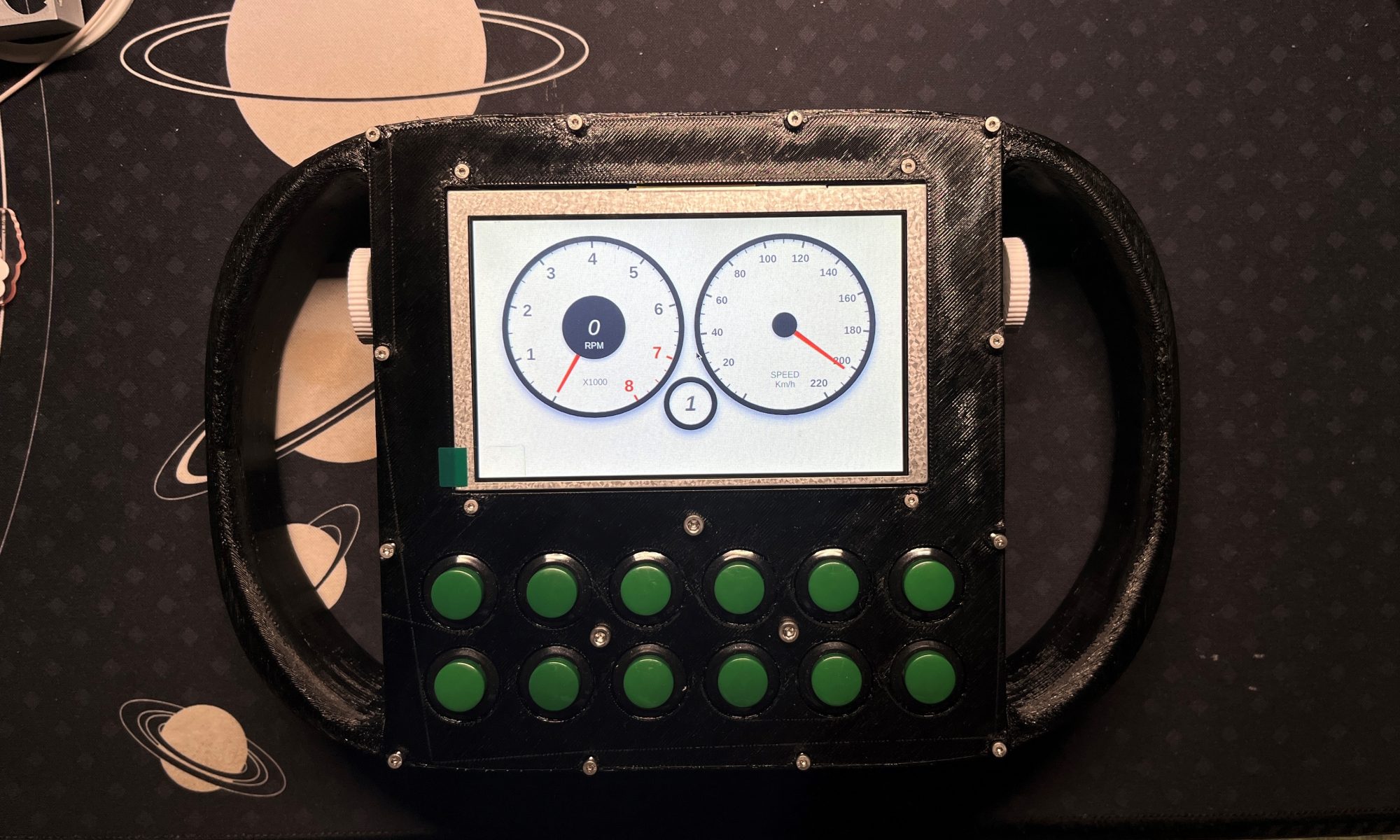
All the major components (components that cannot be sourced at a generic parts store or be found in my personal parts bin) have been sourced and have arrived during the spring break. Assembly has begun and hardware assembly is expected to be done by the end of this weekend, latest by the end of next week (Friday). I do expect little hiccups but so far so good. Currently RPi is setup with an OS running, and the UPS power source for the RPi is up and running (charging function still needs to be tested and API integration still needs to be done).