This week I have two tasks:
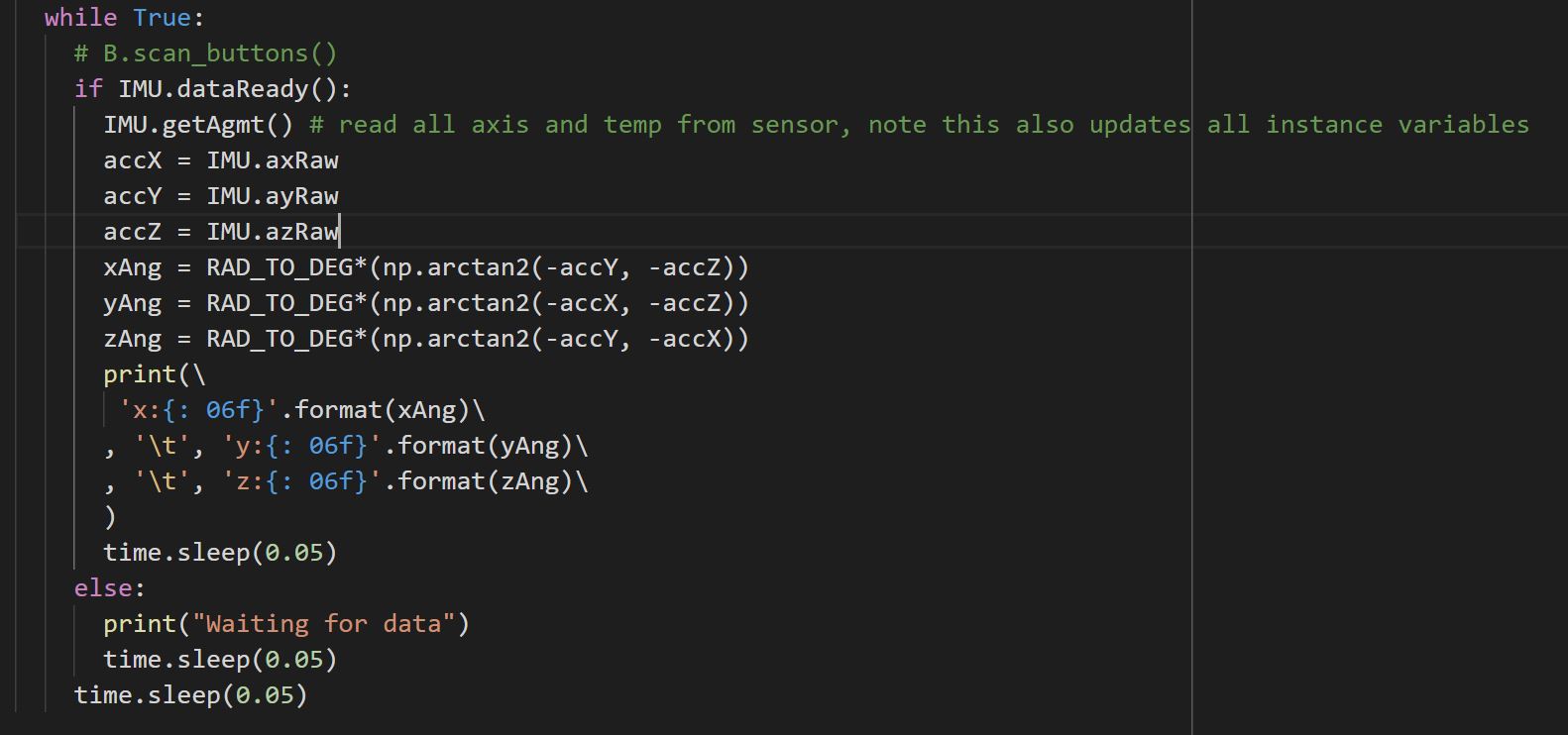
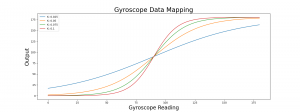
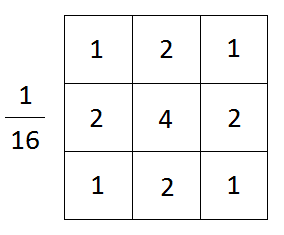
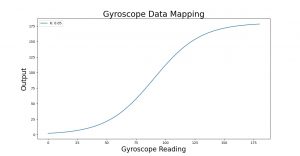
The first and primary task is performing tests for the gyroscope part. Please check the team status report for the video about gyroscope tests. The target for the gyroscope tests are checking its stability and accuracy. The stability test requires the gyroscope to keep its drifting with in 1 degrees. The result shows that the gyroscope output has some noises, but the avearge is not drifting. To better generating this output, I want to apply a Gaussian filter (the one for image processing), which produces a result based on a weighted average of recent gyro readings, to the gyroscope results instead of separating the results to steps of 5 degrees as we implemented now to migitate this issue. The accuracy test measures the tilt error of the gyroscope. We expect the error to be smaller than 0.5 degree, due to the noise the raw data should not fit for this requirement. We are trying to generate average degree data that matches the physical degrees as we keep working on modifying the Gaussian filter to generate a more accurate average degree output.
The second task is preparing the poster for the project. I added some images to the poster and subtitute some texts.

Generally speaking, I think I’m a little behind the schedule due to new challenges we find from testing. However, one thing I noticed is that from the user experience perspective, the current version of our project runs well when I was playing with it. Next week I will focus on testing and finishing final poster and report, as well as preparing for the demo session.