Final Video Demo
Link: https://youtu.be/TN-St_racKw
Xiao’s Weekly Status Update (04/29)
My task this week is the testing of all the metrics of our design. Since I am responsible for the integration, and I have the device, I am mostly responsible for actually doing the testing and gathering the data, while my team mates are responsible for designing the tests. We have met our design goals in some areas, such as gyro drift limit and battery life. However, some metrics such as weight and gyro oscillation are not as fine-tuned as we would like.
Videos and pictures of testing results are in the Team’s Status Report.
We are on track. Test data is ready to be incorporated into the final report.
Xiao’s Weekly Status Update (04/22)
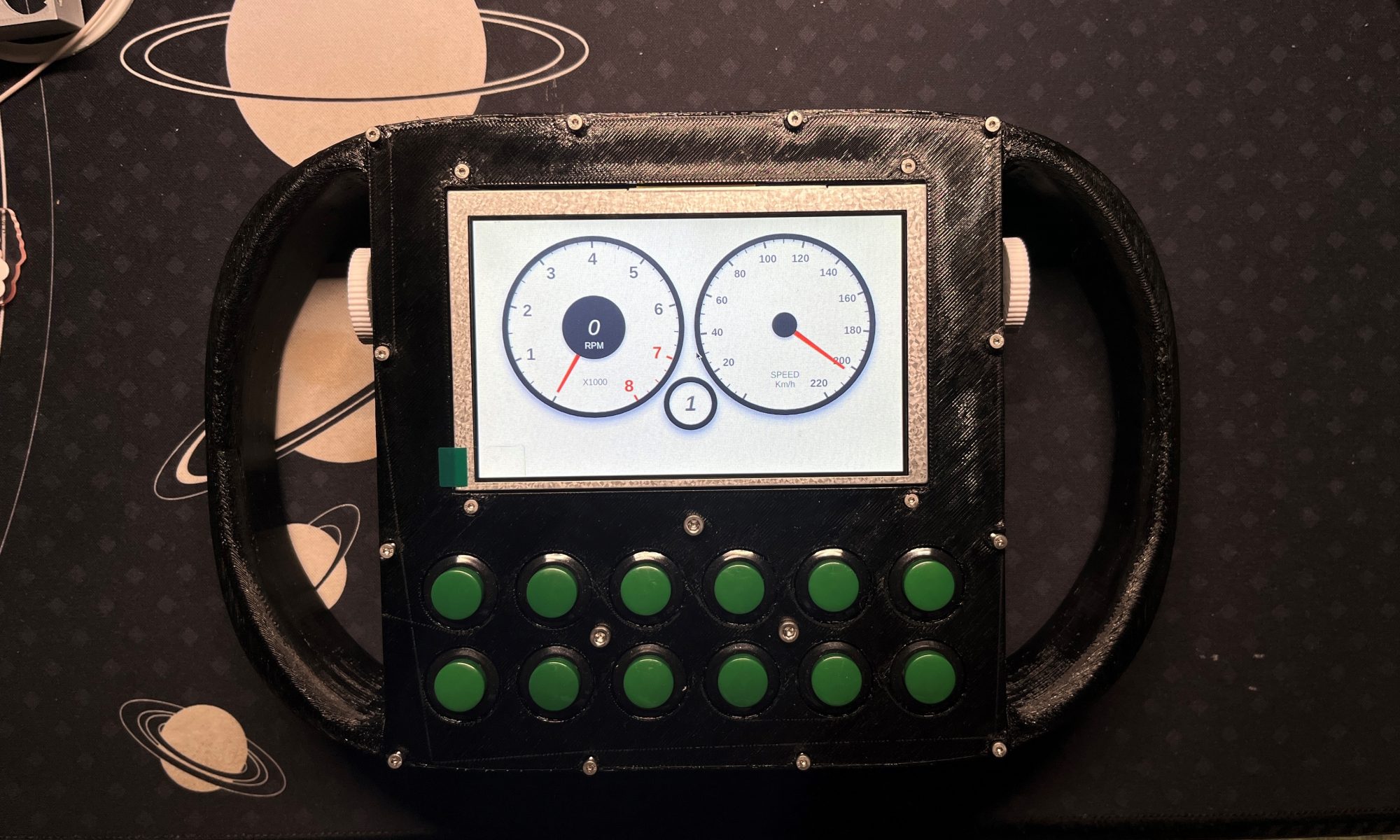
I’ve been working through Spring Carnival to get the first prototype working. It is indeed integration hell. The job of designing the 3D models for the enclosure was shifted from being Qiaoan’s to mine, since he was busy working on the Magwick algorithms for the gyroscope. I designed and 3D printed the enclosure, did custom wiring and now the whole thing works. I also integrated Qiaoan’s gyro implementation and Yuxuan’s gauge UI inplementation.
One small problem is that now the power delivery module is not bolted on to the RPi anymore, and the single power and ground wire I used was not enough for the power requirements of the RPi 4. I will try connecting multiple wires to all of the RPi’s power terminals to solve the problem. So far, the problem is not affecting the performance of our controller (other than the ugly low voltage prompt that is on top of everything LOL).
We are on schedule for next week’s presentation.



Xiao’s Weekly Status Update (04/08)
This week for me, my work focus has shifted from electronics to 3D modeling. I have measured all the components and made rough models of them. The next step is to design an enclosure and stuff everything inside. So far on schedule.
For testing, first of all the electronics are on a piece of breadboard and functionalities can be tested. During interim demo this has already been done. Second of all, the 3d printed enclosure will be test fitted and any modifications can be made easily. After the whole assembly is complete, the battery life will be tested by keeping it connected to the computer for a long time and record time. The controls will be tested by seeing raw input values in the game and comparing that to our desired values. If anything is not working as expected, we either have the member responsible to make changes, or declare the design feature a failure.
Team Status Report for 04/01/2023
This week for our team has been mostly related to integration and collaboration. Hardware setup (wiring and basic hardware interfacing code) has been completed by Xiao, and hardware has been handed over to Qiaoan for further development on IMU algorithms. Yuxuan has acquired another RPi and has been doing development work on Bluetooth transmission and gamepad emulation on Windows. Both Xiao’s and Yuxuan’s parts have been demoed in our weekly meeting to all team members, and development on the gyro algorithm (Qiaoan’s part), as well as integration, is ongoing.
This weekend before our interim demo, we are all focusing on integration. After chatting with faculties on Monday, we decided that our demo should have a complete pipeline working, that is, from hardware key presses, to transferring hardware state over bluetooth, and eventually to reading hardware status on Windows and emulating an XBOX controller.
We are on schedule for now. Integration has its difficulties and quirks, but we have planned for that and have two days working on it. Current expectation for interim demo is unchanged.
Xiao’s Weekly Status Update 04/01/2023
The first half of the week I was focusing on getting a test bench style hardware setup.

The above test bench was what I ended up with. It can be connected to any wifi network for our team members to use anywhere for development. At this point, hardware setup for the preliminary demo is all complete. IMU is able to output raw data (acceleration, gyroscopic, magnetic, each with 3 dof). ADC reads raw voltage input from the potentiometer. All 16 buttons work.
On Monday I transferred this setup to my team mate Qiaoan for coding and testing of gyro algorithm. Over the course of this weekend I will coordinate with him to get the hardware control part all working as a whole.
As the preliminary demo is imminent, I think my part is right on schedule, but could have gone a little bit faster.
Xiao’s Weekly Status Update 03/25/2023
This week I have been working on completing the hardware wiring of our project. I set out planning to connect every breakout board on a piece of breadboard, and attach everything to a temporary 3D printed back plate for easy transportation.
I encountered some problems with I2C buses on the RPi at first. As our power management, gyro, and ADC all use I2C (4 addresses in total), It presents a heavy load on one single bus. What happened was that one of the addresses for power management would keep disappearing, leaving the power management board inoperable. I later solved it by creating a second I2C bus using two extra pins on the RPi, and connecting the power management board to that new bus separate from the gyro and ADC. ADC is now wired up with the potentiometer.
On Sunday hardware operation code will be finalized, and pushed to GitHub. Then I will give the completed hardware system to my team mates for the software side of things.
Xiao’s Weekly Status Update 03/18/2023



This week I have been focusing on hardware building. Following last week’s experiments with the battery module, now I have got it working with complete python API for charging status, charge level, and so on. Charging is via USB-C and so far works as I expected.
Additionally, I 3D printed a test case for a 4×4 button matrix and wired it up. Code has been written with python, which stores the buttons’ status in an array that’s updated with every button press.
At the time of writing this status update, I am working on wiring up the gyro and potentiometer and ADC. Expected to be finished this weekend.
If all these features are implemented during this weekend, then we’re still on schedule. If for any reason hardware implementation takes too long, I think we’ll reconsider whether it is necessary and viable to design a custom PCB, or do we just use hand made wiring.
Team Status Report for 03/11/2023
The past 2 weeks, including the Spring Break, had mainly two focuses. First one is to reorganize work assignments to our team members and get the design report written and submitted, and the second one is to order the parts and start building hardware and testing software.
The design report was a big challenge for us. We stupidly ignored everyone’s advice on starting early, and left ourselves with barely enough time to finish the report. We did try our best to gather every piece of information we could on the parts chosen, and documented every step in coming up with our design. The truth is, we messed up because we were all too busy with the sudden workload increase from multiple midterms, and we were focusing perhaps a little bit too much on actually building the device, rather than writing the report.
Schedule updates:
Hardware is on schedule. We expected delays during the spring break, but it turns out the parts did arrive very quickly. Building and testing has begun ahead of schedule.
The software is mostly on schedule. We are beginning to try installing and running demo programs using the Python packages we have identified in our design review. During the process, we went through challenges in installing as some packages are not maintained and stable. Alternative solutions have been experimented and we aim to run demo programs successfully next week.
The gyroscope system is mostly on schedule. We have came up with initial designs to implement the system. We have started writing the python code based on our design for the tuning functions. Though we cannot start testing the design without the hardware, we can draw graphs with mock data to see the output of the function.