
This week I have primarily been working on the crash detection algorithm .I’ve gotten it working to the point where we having boundary outlines of the moving objects in frame. Here’s an example below: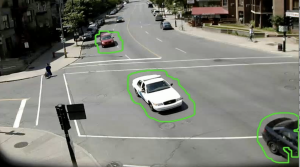
These cars are moving in parallel. There’s an example of a crash I put in the team status report.
The thing we need to fine tune is when we decide overlap of these boundaries are indeed a crash. What we are trying to do right now is using directions. When I detect overlap, i go back a few frames and track the movement of the object. This gives us a direction vector. If the two objects that are overlapping have similar i.e. parallel direction vectors then they are probably just next to each other in lane and it’s not a crash. If they are travelling in opposite directions i.e. perpendicular then we classify it as a crash. I think there’s still some fine tuning to do however in terms of leeway and getting the exact metrics right in terms of how much overlap and how perpendicular of an angle we require to classify a crash.
Overall we are a bit behind schedule, but we aim to catch up by the interim demo. I certainly want to get this working more robustly by then, and work with my team members to effectively interface with the other major part of our project which is the crash detection module.