This week I made substantial progress on writing the foundation for the Player UI and Dealer UI. I used a game module called “Pygame” to write the following GUIs.
This is a basic home-screen that will be used for the Dealer UI. Clicking on each square takes your to the appropriate screen.

This is the “Start Game” screen which simply displays the current players in the game and the pot size in the middle.
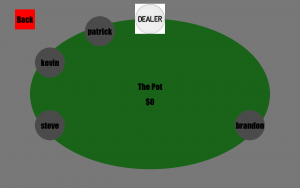
This is the “Add /Delete Players” screen which allows you to add and remove players from the table. Clicking on a specific spot will prompt the user to provide a name for the player.

I was last working on the “Chip Color Configuration” screen which will allow the user to change the denominations for the the given chip colors (white, red, green, blue, black).

In the upcoming weeks, I plan to refine these interfaces and also complete a “Stack Size” calibration screen which will allow the Dealer to edit the stack sizes of the players in the game.
I will be more focused on refining these interfaces and making them easily integrable into the main system and the Game State Tracker.