
This week our team finalized specific parts we need to complete our project. I sent in my specific requests for the parts I need and I will be waiting for those to arrive in the next week or so. In the meantime, I have been working on our design presentation, and fleshing out the design requirements for the dealer interface I will be writing, and how the game flow for the game state will operate. In the coming days, I plan on polishing the slides for the presentation, and preparing Steve the information he needs to convey.
Brandon’s Status Report for 3/6/21
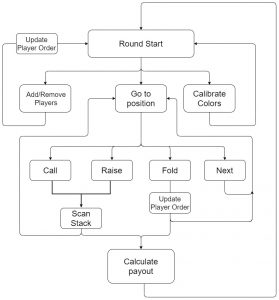
This week has mostly been spent ordering parts and working on the design review. I diagrammed a couple flow chart and helped to create the game state representation. I also drew out a basic schematic of the table layout. I also ordered a camera, and my teammate ordered me a Raspberry Pi. I hope to work next week on the physical hardware and begin to detect and measure stacks.
Team Status Report: 03/06/2021
This week our team met and made great progress. We solidified our design specifications for the Smart Poker Table, and elaborated on the game flow for the dealer interface. We made block diagrams for the game flow in software and explained how different components will be communicating with each other on a macro level. We also constructed a Bill of Materials for all our expenses, and placed orders for these parts. We are currently working on our team presentation, and are looking forward to a good presentation on Monday.
Zongpeng Yu’s Status Report for 02/27/2021
This week I looked for motor that we gonna use to spin the camera. We decided on using a servo because we can have it rotate to an exact location. Also there is no need for motor controller because we are only having one servo and we need external power supply for it.
The part i picked is a 360 continuous rotation servo with feedback from adafruit. With the feedback, we can determine the location/rotation of the servo and we could use PWM to let it rotate to certain player’s position. Also this servo provides enough torque to support the camera on top of it.
The link is: https://www.adafruit.com/product/3614?gclid=Cj0KCQiA-OeBBhDiARIsADyBcE4ks19fWb6nEjYKXbqq6JSbYBFpyEwgnjR2dLRSK4ZkQxkaQgekr6MaArZCEALw_wcB
Servo driver: https://www.digikey.com/en/products/detail/adafruit-industries-llc/815/4990757?s=N4IgjCBcoLQBxVAYygMwIYBsDOBTANCAPZQDa4ArAEwIC6AvvYVWSHGBSIWAGwAESABboAdiNyYQDIA
Brandon also shared a servo on raspberry pi tutorial: https://learn.adafruit.com/adafruit-16-channel-servo-driver-with-raspberry-pi/using-the-adafruit-library
Patrick’s Status Report 2/27/21
I started this week by presenting our team’s slides for the proposal presentation. The presentation went well and I received great feedback from my peers. After presenting, I looked into the software that I would be working with for the Dealer UI and the game state logic. We decided as a team that the best solution to integrate all components of this project is to use a Raspberry Pi. Using a Raspberry Pi will allow us to centralize all our information, so all of our different Python modules can communicate with each other effectively. For the physical Dealer UI controls, we brainstormed ideas like using keys on a keyboard or even buying a Raspberry Pi touchscreen. We plan on finalizing these decisions in a couple days and placing orders for parts ASAP.
Team Status Report: 2/27/2021
We spent the beginning of the week participating in the group presentation review. At the end of the week, we met and solidified our thoughts regarding specific software and hardware choices. To summarize, we decided to use a Servo as the motor for our spinning camera, a standard web camera for our CV, and to centralize all our software on a Raspberry Pi. A minor setback this week is deciding who should receive the parts, as some of the team is currently located outside of Pittsburgh. Once we finalize that and other outstanding design choices, we will begin placing orders.
Brandon’s Status Report: 02/27/21
This week’s progress has been slightly slower than I had expected. I spent some time reacquainting myself with OpenCV and looking at hardware elements we might need for the project. Two examples of good cameras I have found are:
Both meet the technical requirements we placed for the cameras except maybe for power. However, since USB 2.0 is power limited by 0.5 A max, then the theoretical upper bound on the webcam power usage is 2.5 W, which is perfectly acceptable.
Next week, I hope our team can get together and work on the design for representing game state.
Proposal Presentation
Zongpeng Yu’s Status Report for 02/19/2021
Like everyone else mentioned, we pivoted our design. What I did for this week is thinking about the positioning of the camera/cameras so occlusion won’t become an issue. We will need to add some constraints(designated area on poker table) to where players have to put their stack and bets. I am still a little uncertain about where the pot size has to go because normally people put those in the middle of the table. However, if our camera is in the center, the pot will block off player’s bet and stack size. One way to avoid this is to raise the camera in the center so it is viewing players stack and bet size at an angle. However, I am not exactly sure how the computer vision software can handle this.
Patrick Kollman Status Report 2/19/21
This week we pivoted from using RFID to mainly using CV for our project. I have more background in RFID and less in CV, so this past week I’ve been doing my own personal research and browsing around the internet on the basics on CV so I can familiarize myself with key concepts. I’m planning on focusing more on the software side of things and writing the interface for our product, but it’ll help knowing the basics of CV to connect everything together. Love the way things are going for our project and the pivot we took.