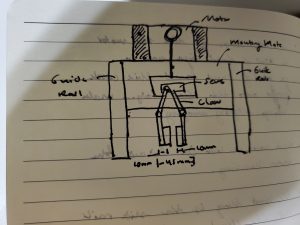
This week I focused on the design of the gantry. I worked mainly on the design of the new gripper along with Lillie. A servo-controlled claw that is attached to a stepper motor controlled elevating platform. The claw has foam attached to the its ends to add grip. This approach was chosen because of the size constraints we have when picking up pieces. The claw itself has an initial opening of 45 mm to accommodate the 10 mm of foam on each side of the claw.
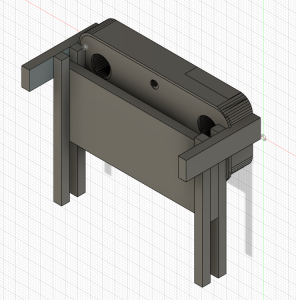
Above is a CAD model of the gripper plate that attaching to the Y-Axis end of the gantry. Below is the design concept of the full Z-axis system.
This week I will be building our Z-Axis motion and begin programming our X-Y stepper controls.