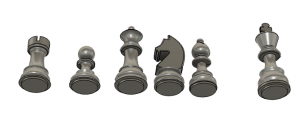
This week I helped finalize the project proposal presentation slides. I also met with my team to put together a bill of materials. I 3D modeled custom chess pieces for the game. Each piece has the same circular platform on the bottom that will help the grabbing mechanism pick the pieces up. I’ve been researching what type of gripping mechanism we should use. I’m trying to figure out if a hinged gripping mechanism would be better than a gripper that retracts up and down so as not to knock over other pieces.
This week I will be finishing the gripper design and beginning the web client interface.