The first thing I did this week was to get internet (WiFi from MaC) working on the board, so I could use okpg (the Angstrom package manager) to install basic commands and kmod.
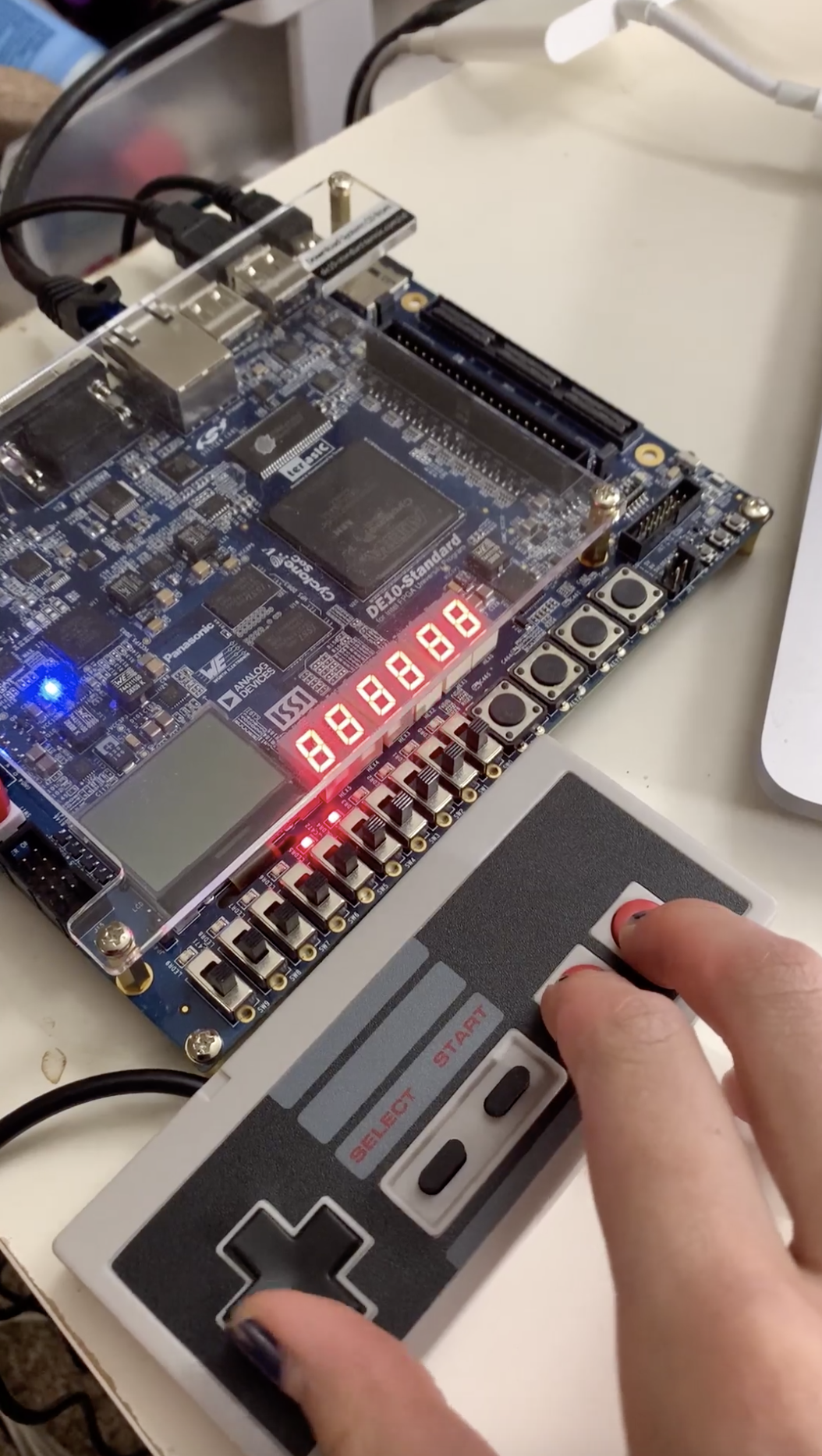
Then, I tried meddling around with connecting the NES USB controller to the board, but I couldn’t see any additions in /dev/input. To start simpler, I acquired a wired mouse, and added it on the second port, though couldn’t find it either. However, lsubs and fsdisk showed the devices.
After figuring out which device was the addition, I looked into the events in /proc/bus/input/devices and found the mouse event. It then also appeared in /dev/input.
I later realized that the NES Controller wasn’t going to appear in /ttyUSB* because it wasn’t a serial device, and thus the approaches outlined in here wouldn’t work.
After isolating the character event through dmesg and simple hacks like printing out system state at various points of plugging and removing the attached device, I couldn’t read legible data from the device.
The kernel modules that would’ve made it easier to read the usb input weren’t compiled into this distribution of the Angstrom kernel. So I tried to compile the missing kernel modules that would enable me to read human-readable signals, (modules – xpad/joydev). I am currently attempting that.
In the meantime, I have started reading up accessing the SDRAM. I will use a USB storage device to store memory instead of flash (or so is the plan, for now), because the board is still booting off of the Linux console version on the flash storage media (mirco SD card), and as far as I can tell, the guide doesn’t have a way of flashing the board, but I’ll keep searching for one. It is not a priority if the USB storage device can store persistant memory.
However, I’ve to understand how Qsys works, because from the SOC community, it seems like using qsys to initialize the AXI bridges is the best way to communicate with the SDRAM on the fpga side. I don’t have a Windows machine, and System Builder needs a Windows machine to generate the basic template (figuring that out).
Goals for next week include getting further along with saving data from USB storage to SDRAM, and making sure data integrity is persevered. I also hope to get NES controller unit tests working.
Some relevant sources:
- https://www.raspberrypi.org/forums/viewtopic.php?t=160400
- https://stackoverflow.com/questions/15949163/read-from-dev-input
- https://stackoverflow.com/questions/3737655/reading-usb-input-stream-on-linux
- https://forums.nesdev.com/viewtopic.php?f=9&t=19698 + latching????
- https://stackoverflow.com/questions/3737655/reading-usb-input-stream-on-linuxhttps://stackoverflow.com/questions/15949163/read-from-dev-input
{kind=link}