System Changes:
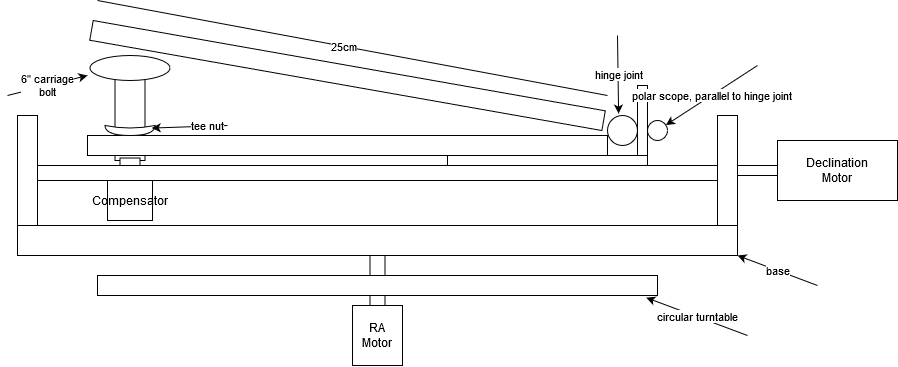
The main changes done this week basically break down to design changes to accommodate parts trickling in over time. Most of this is adapting the previous eq aligning design to the new barn door tracker. After receiving the universal stepper motor couplers I should be able to assemble the top portion of the diagram above with the exception of the motors since I do not have the pcb’s yet and I would like to thoroughly test them before placing them into the mount. Some things to point out in the diagram below include:
- The polar scope is manually (by us, not the “user”) aligned parallel to the hinge joint adjacent to the scope.
- The compensator motor is attached to the declination base and the universal hub is attached to the carriage bolt.
- The motor is kept from spinning by two #4 threaded rods that are locked into the barn door tracker base by two #4 nuts each. As the cariage bolt actuates the motor is pulled along with it so spacing must be kept in mind and a hole of sufficient size must be bored in the declination base.
- The base below the main barn door tracker compensator is essentially the same design as the one previously done by Joy for the previous iteration of this project. Some adaptations have been made to fit the new requirements. (As discussed above).
Progress has also been done in adapting logging for the Arduino. Getting the logger right now outputs to csv in real-time via a python script.
Risks:
Unfortunately, the arrival of the incorrect board types set back demo-readiness a fair bit, hopefully once the new boards arrived the new design will be ready for it. So that’s a risk that we could face.