Started codebase for detection and path planning integration
Created classes for vehicle and track info
Worked on design report
TODO
Implement scheduling algorithm to ensure fairness
Just going to be keeping a counter for how long car is waiting without progress. System will choose the vehicle that has been waiting the longest to pass through the center lane
Test vehicles to correlate numerical values that we use to program the motors with actual speeds in cm/sec
Collaborated with team to find alternatives and solutions for NodeMCU struggles. Settled on buying the boards from another manufacturer and that seemed to work.
Created a metrics document for the driver model
This related the vehicle speeds and the various distances the vehicle would travel in case it needed to come to a stop
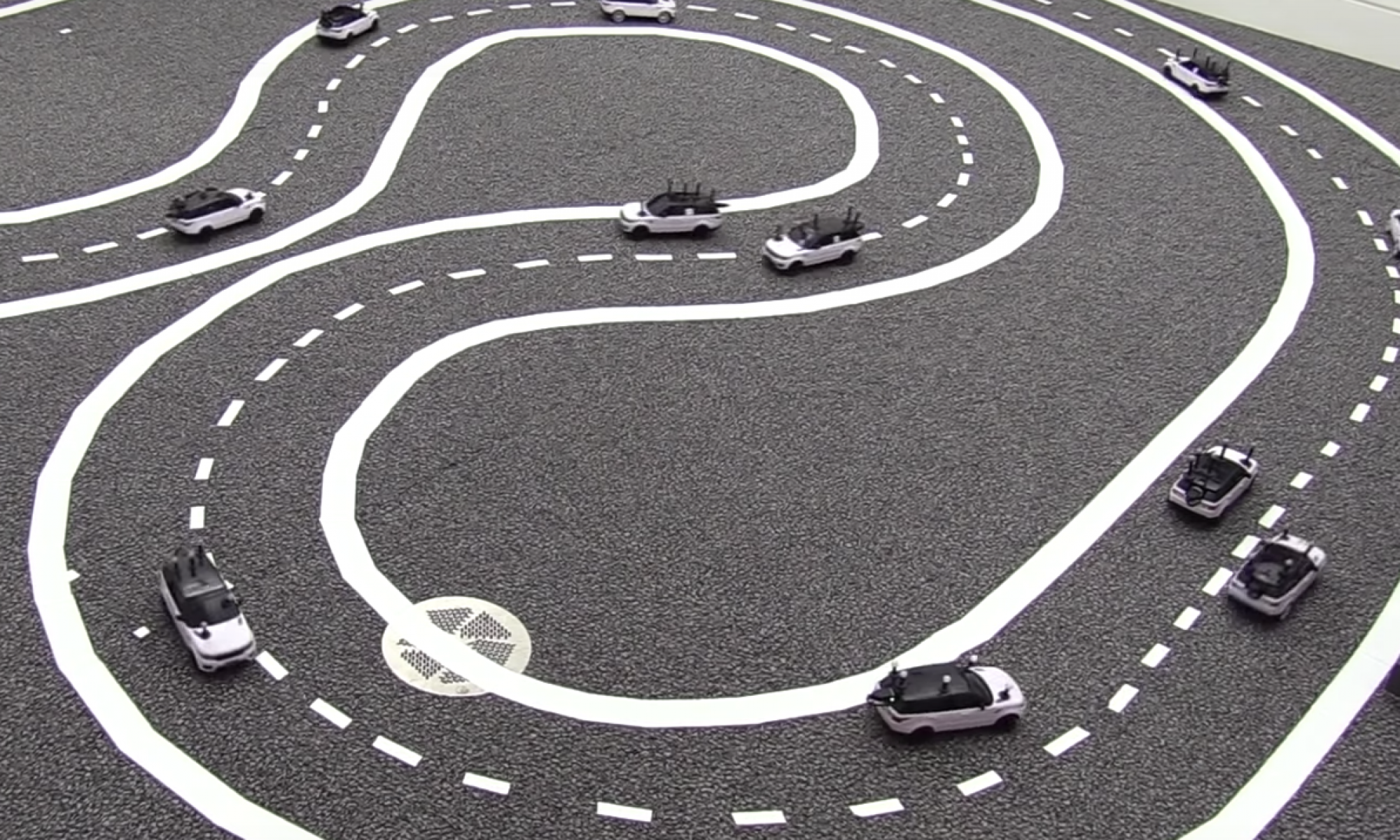
Used the metrics to determine the size of our track
# of cars * (Total following distance between cars + Length of cars) = Circumference of one track
Performed tests with the vehicles in order to determine max vehicle speed and also a stopping distance
Worked on design review presentation slides
Slightly behind schedule with regards to the path planning algorithms. The major roadblock with the NodeMCUs and the construction of our vehicles was necessary to overcome in lieu of the design presentation (needed numbers for our presentation)
TODOs:
Need to do more research and start the codebase for the path planning
Non-cooperative case does not seem too challenging, but need to find a good solution for the cooperative case.