- Updated timer to be consistent with global python time function
- Updated path planning code in cooperative case to incorporate chains
- Minimize following distance in the cooperative case
- Included other statistics in output file (i.e. average velocity, acceleration, deceleration, waiting time, etc)
- Worked on merge functionality for 2 lane track before focusing objective towards optimizing figure-8 track (no longer doing the 2 lane though)
- Change the weighting in the path planning algorithm
- Run test cases to collect results for each case
- Fix bug for vehicles in both tracks in the intersection
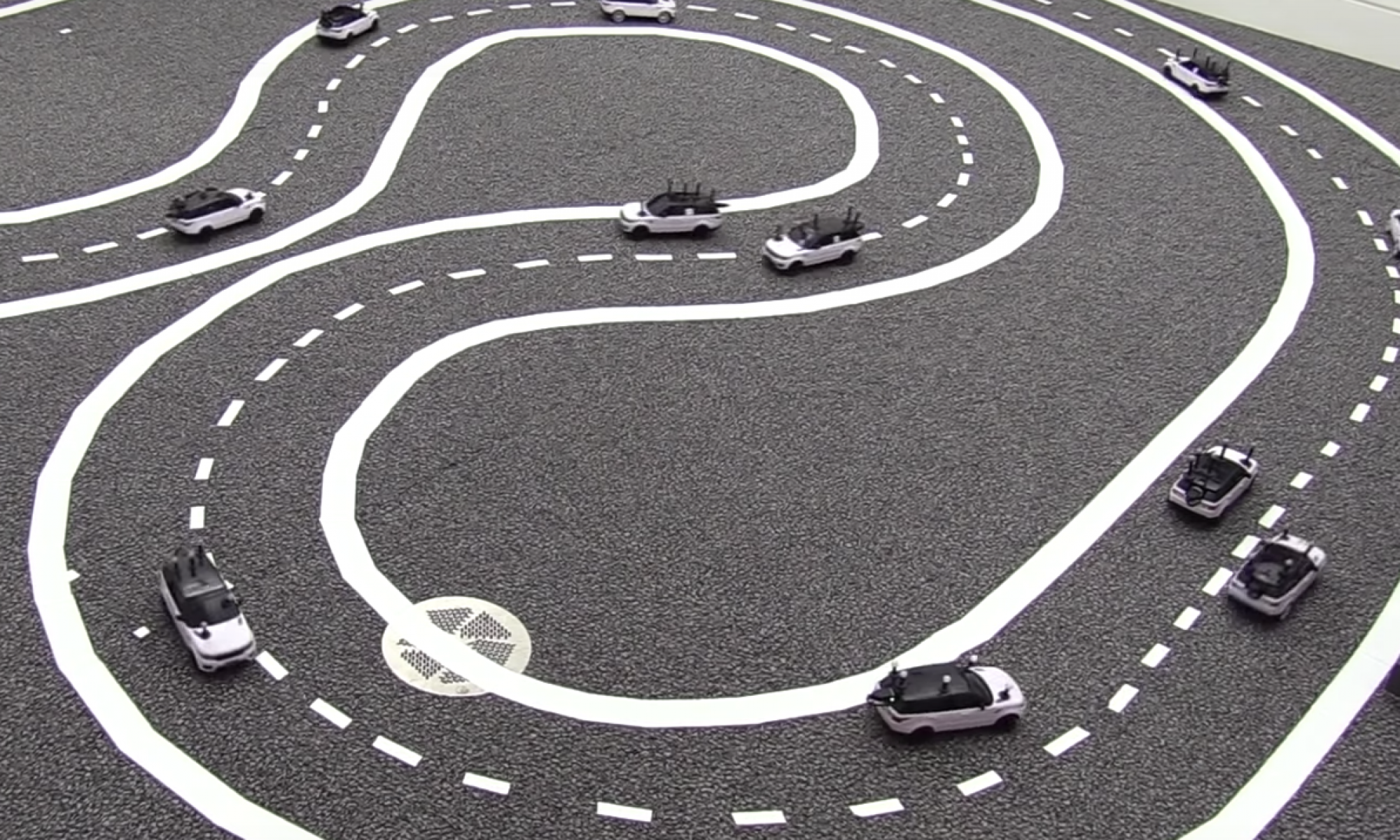
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew