Final Presentation Slides
Team Status Report 4/25/20
- Fixed intersection collision bug
- Added a check if vehicle is within intersection
- Added safe following car model in cooperative mode
- Fixed bug with max acceleration in car following model
- Updated buffer distance in non-cooperative mode
- Added time feature for separate behavior for simulation and test cases
- Made test case results for demo
- Worked on how to present demo
- Worked on final presentation
Serris Status Report 4/25/20
- Continue to improve and build our test cases
- Added timing feature for result testing
- For the video/simulation, system time would be used to determine speed
- For test results, a timer counter is used (independent of system time), thus each update is 0.015 seconds
- Made test results to show for demo
- Worked on how to present demo
- Worked on making final presentation
Team Status Report 4/18/20
- Updated timer to be consistent with global python time function
- Updated path planning code in cooperative case to incorporate chains
- Minimize following distance in the cooperative case
- Included other statistics in output file (i.e. average velocity, acceleration, deceleration, waiting time, etc)
- Worked on merge functionality for 2 lane track before focusing objective towards optimizing figure-8 track (no longer doing the 2 lane though)
- Change the weighting in the path planning algorithm
- Run test cases to collect results for each case
- Fix bug for vehicles in both tracks in the intersection
Serris Status Report 4/18/20
- Continued to work on merge function for 2 lane track
- After meeting with professor, decided to focus solely on optimizing figure-8 track for demo
- Updated timer so it would be consistent with global python time function (regardless of machine)
- Included other statistics in results file
- Average velocity through vehicles
- Average acceleration through vehicles
- Average deceleration through vehicles
- Total waiting time
- Continue testing other cases
Serris Status Update 4/11/20
- Added information detection radius feature
- Added mode button
- Can toggle between cooperative and non-cooperative approach
- Added labels on cars
- Fixed bugs on vehicle collision case
- Added test case to compare throughput between cooperative and non-cooperative approach
- Filtered test cases to ensure cars don’t overlap
- Started merge function for 2 lane track
- Changed timing so movement is consistent between machines
- TODO:
- Change timing of tests to be more consistent with machines
- Continue to work on implementing merge
Serris Status Update 4/4/20
- GUI additions:
- Total loops counter: counts number of times each vehicle passes the intersection (better for visual representation)
- Timer: “s ” to pause/resume, “r” to reset
- Finish line for visual
- Added cars to outer lane of 2 lane track
- Continue to modularize code as changes to path planning algorithms are being made
- TODO:
- Show information detection radius
- Add toggle button for cooperative and non-cooperative case
- Give more information on decision making for each vehicle
Team Status Update 3/28/20
- Connected graphics code to path planning code
- Redesign classes to be more modular and compatible
- Made adding vehicles on the track customizable
- User can click anywhere on the track and have a car oriented appropriately
- Added information at the bottom of the screen for future reference
- Implemented simple non-cooperative and cooperative path planning algorithm
- Discussed alternative track configurations to explore
Updated Risk Management Plan
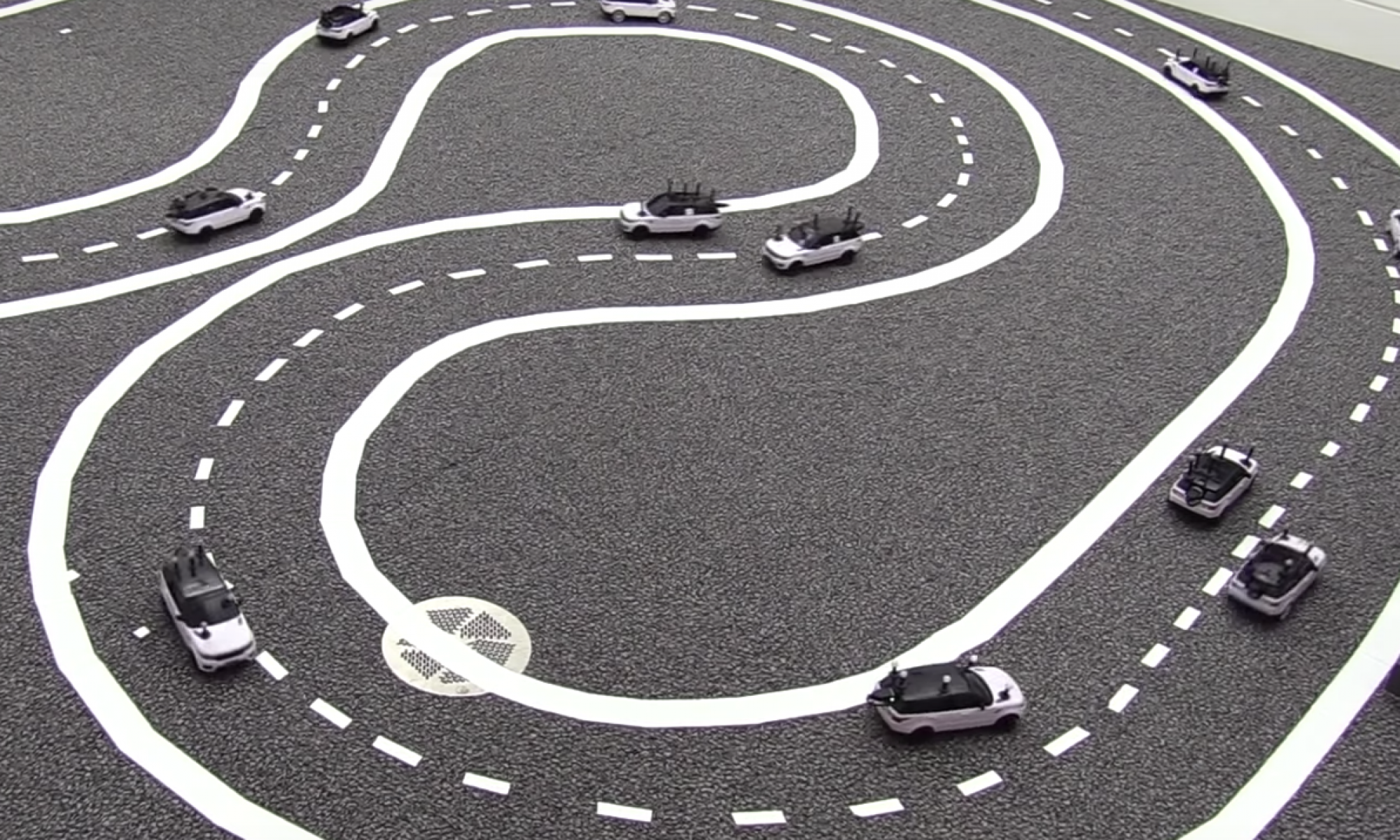
Having completed simple graphics and path planning algorithms, our upcoming tasks will be primarily optimization, enhancing our graphics, and possibly implementing another track design. In terms of optimization, the potential risks are that the cooperative approach simply does not see a significant increase in throughput compared to the non-cooperative case. This might be explained by the simplicity of the one lane figure-8 track design. And therefore, we would need to experiment with other designs where the difference might be more noticeable, specifically a two-lane approach. In addition to another design, we were considering displaying each vehicle’s decision making data to highlight the differences between approaches. We thought this would be more informative than just the visual of the vehicles moving along the track. Because we have gotten a good head start on the figure-8 track, we should be able to determine results within the next week, giving us plenty of time to implement another design with added complexity. Furthermore, while Tito and Kylee will be experimenting with fine-tuning parameters, Serris will continue to update the graphics to provide a more informative and maybe interactive report of the system.
Serris Status Update 3/28/20
- Modularized code more to allow cars to turn right or left depending on which track its on
- Personalized it so user sets cars initial location by clicking anywhere inside the track
- Automatically sets the angle from location on track
- Allows many different cases to test with no limit on number of cars
- Display each cars data on the bottom of the screen
- Working on getting a timer to find the relationship between vehicle class speed and rotations
- Will help in later cases to calculate throughput over a given period
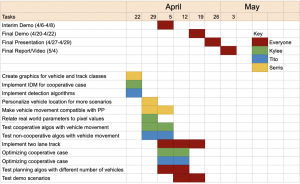
- Created new gantt chart
- TODO:
- Make sure vehicles can’t overlap when adding to the track
- Create new tracks
- Develop vehicle class to make it more compatible with PP