- Consolidated design specifications such as maximum vehicle control latency based on worst case scenarios.
- Measured average-case performance of object detection algorithm. It processes approximately 28 fps.
- Wrote design report/ design presentation
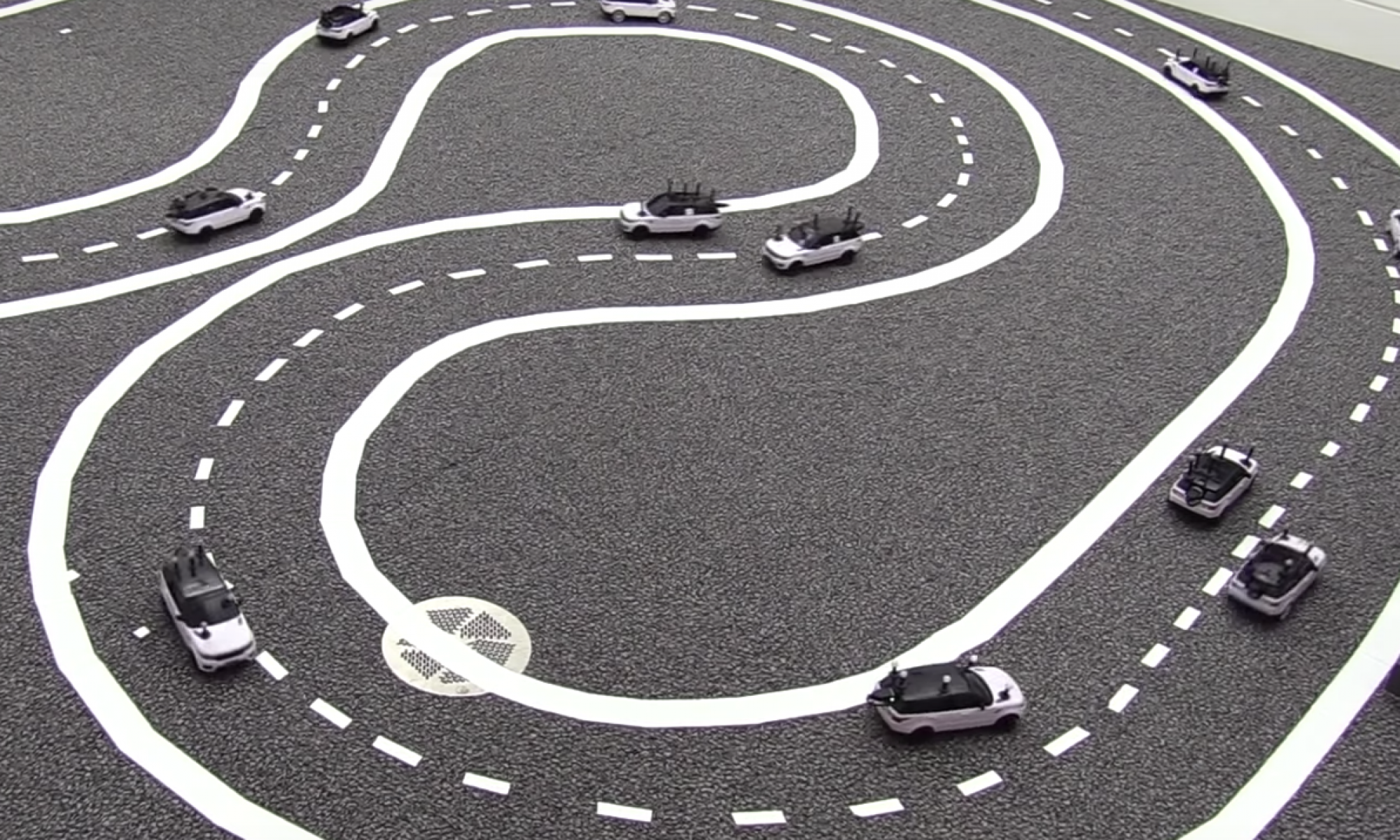
Team A1: Cooperative vs Non-cooperative Autonomous Driving
Carnegie Mellon ECE Capstone, Spring 2020: Kylee Santos, Tito Anammah, Serris Lew