3/23 – Weekly Update
Christina
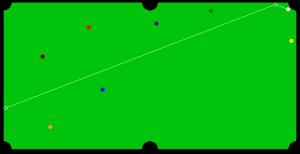
Over break and the course of the week, I finished up the core code for the CV component. It is still buggy and needs some additional work for integration, but we can now detect the pool table edges and all the balls and cue sticks to an accurate degree. The perceived vs. actual location difference of the balls was within .3 inches, which is very close to our requirement of within .5 cm. This week, I worked on integrating the CV component with our Software Backend for a full project. A few issues that arose included outputting the coordinates in a scaled manner that the rest of the backend could use. In addition, I focused on testing the accuracy of the individual CV component. The CV component with our sample test cases proved fine, but when integrated with our test hardware proved less accurate. I narrowed this down to the megapixel resolution of our camera. I am exploring options of a lower camera height or a higher resolution camera as a means of gaining more accuracy for the rest of our software!


Harry
I worked on integrating the frame, projector, and camera with the rest of our software. I re-built our frame into a “n” shaped piece, and ordered more parts. We focused on minimizing wobble in our switch to this configuration. In addition, we explored using velcro strips versus zip ties as means of attaching our electronics. In addition, I am exploring different mounting options to get the most physical stability and consistency in the ability to reproduce our test cases. I’m looking at buying more parts to finalize a frame design before we can cement our pieces together to further increase stability.

Sam
I worked on integrating the Software Backend with our CV component. This involved translating the classes that Christina wrote (e.g. coordinates for the pool balls and points on the cue stick) into classes that my code could use. A few issues that popped up were the dependencies and including our modules. I focused on adapting my physics and pool modules into a global main runner. In addition, I adopted my interface to match with the CV outputs. I also looked at extracting and refining the ghost ball tracking as our first feature. I am looking at trimming my other components into further features for our demo. In the end, we got a somewhat working product at the end of our Friday meeting. 🙌

TEAM
This week, we focused on integrating the parts of our project together. We mounted the projector and the camera onto our PVC frame and ran our end to end simulations. We spent a decent amount of time working together in lab. In conclusion, we had to resolve several Python module dependencies and other integration-related software bugs. We are a bit behind schedule due to these issues with software integration. However, we aim to work hard and sprint next week to deliver for our demo! Choo-choo, no stopping us now!!! 🚂💨 So say Geronimo!