Risks -> Contingency Plans
- Not getting a stable motor component -> research other H-bridge components and find out why the servo isn’t working
- Low accuracy -> add a null prediction value to the algorithm
Changes to system design -> why changes are necessary
- Stay tuned for next week’s update when we find out what motor we’ll be using
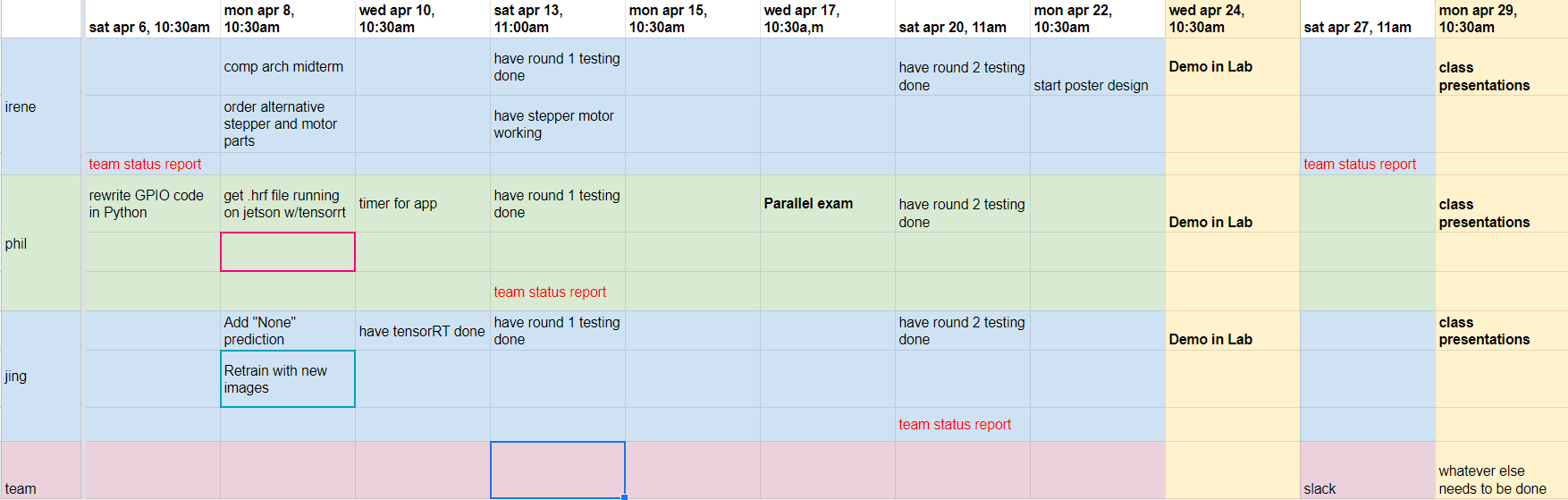
Updated schedule