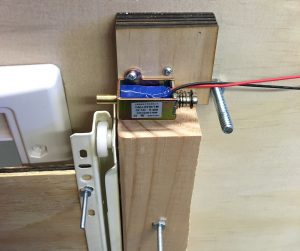
First, I attached the solenoid to the door:
I happened to be in the right place at the right time to overhear Professor Nace say that Ryan Bates from Tech Spark has a box of stepper motors. I talked to Ryan and he let me borrow a stepper motor and L298N Dual H-Bridge Motor Controller. When I followed a tutorial using the same motor and H-bridge motor controller with an Arduino, I couldn’t get the system working.
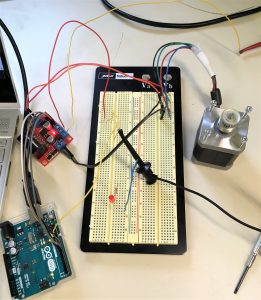
I poked around with an oscilloscope and saw that there is current flowing through the H-bridge, but not a lot. Next, I asked Nathan Serafin for advice, and he said he could lend me a few motors. I tried switching out the motor, but the motor still did not work. I met with Sam to try to get the motor working, and he pointed out that my power supply could not source the amount of current needed at the voltage wanted. He borrowed a bigger power supply from the CMR garage, and the motor didn’t work, so we tried borrowing an identical H-bridge component from another team. The motor moved with the new H-bridge, but the H-bridge was overheating. So we concluded that the H-bridge from Tech Spark was faulty, but that particular H-bridge model is not strong enough to support the stepper motor. Sam suggested I investigate the servo again, which I will be doing. I also talked to Nathan Serafin again and he suggested researching this alternative H-bridge.
In between all the motor things, I found time to do a timing analysis on the integrated machine vision script. I segmented the code into the following blocks: initialization, resizing, converting to grayscale, applying Gaussian blur, calculating frame delta & applying binary threshold & computing contours, tracking where to crop, prediction, and drawing the frame. I counted the number of times each block was executed, the total time spent executing a code block, and the total time for execution of the whole script. I found that image saving, image resizing and drawing things on top of the frame took the most time. Therefore, for the integrated script, I removed the text and rectangle overlays on top of the frames and only displayed one frame. I am keeping the motion detection script separate with all the intermediate frames displaying for the purposes of fine tuning and debugging.
I will be placing orders for alternative motor parts and trying them out. In the next status report, I will detail the pros and cons of each alternative, and why they did or did not work. I’m busy until the start of carnival, which works out well because the new parts will not arrive until Thursday at the earliest. I can work over Friday and Saturday.