Because our team decided that we would do integration in April, we have been focusing on individual parts for the in-lab demo on April 1. Irene will demo her Computer Vision algorithm, Jing will demo his Machine Learning inference, Philip will demo his iPhone app, as well as GPIO with the Jetson board.
Unfortunately, there are a few risks which have set us back.
- For the cat door, the servo is jittery and doesn’t work, so Irene is planning on using a stepper motor instead. While we’re certain the stepper motor will work, in case that it doesn’t, Irene will consult her robotics friends and order multiple stepper motors to make sure that it can open the cat door. The only costs here will be the price of two or three stepper motors.
- For the Machine Learning inference, we have reached a peak of 75% accuracy on the validation data set. While this is reasonably high for demoing purposes, it doesn’t meet our initial goal of 95%. After trying several different architectures and regularization functions, we decided that the best way to improve accuracy is to enlarge our data set. Over the next few weeks, we will attempt to find more images to add to our data set by scraping them off of Google images.
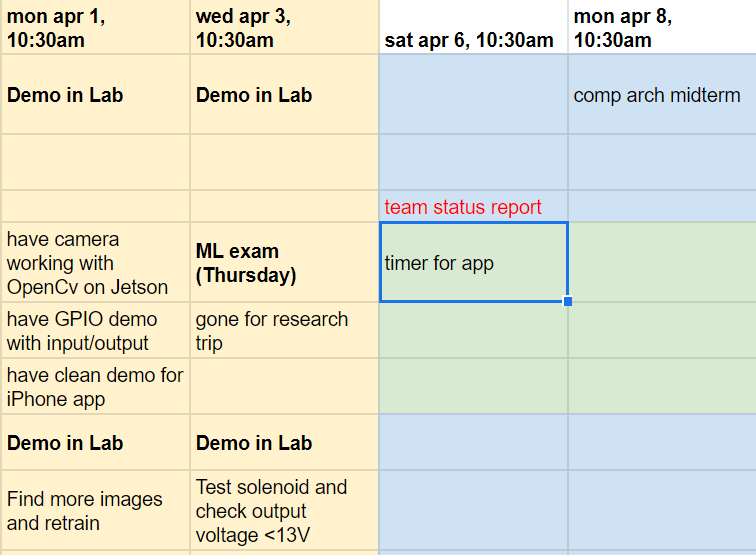
The schedule is approximately the same as before, with a few extra tasks. Originally, by next Saturday April 6, we planned on doing the following tasks:
Irene: Integrate CV and ML
Philip: Get camera feed on Jetson
Jing: Run Tensorflow on GPU of Jetson
The tasks that we have added are:
Irene: Get stepper motor to work with the door
Jing: Build and test solenoid circuit