A video demonstrating our project can be found here: demo.
Team Status Report For 12.9.23
As I’m sure is common among many groups, this week our team was basically exclusively focused on getting our project ready for demo. On that front:
Engine: The engine is fully operational with high accuracy value and policy networks. In the demo version, a simulation depth of 25 is used, meaning the engine is looking up to 25 moves into the future (though the average would tend to be between 8-10, with a minimum of 4). The engine has been integrated fully into the web app, and both real-time and historical analysis work as intended.
Web-App: The web-app is fully operation on its own. Integration with the engine has been completed, as mentioned earlier, however integration with the physical board is not quite complete. That being said, the analysis function works as intended, and communication with the physical board is almost complete, pending a full debug of said board.
Physical Board: The physical board is almost fully complete. The LEDs have been soldered, meaning the only remaining issue is debugging 2 of the muxes that are having slight issues. This should be done easily before demo, as it is a known issue that has been fixed on 2 of the other muxes already. Full integration with the web-app has been done, but the overall product has not been fully tested, as it is not possible without working muxes. That is, with the outputs coming from the muxes currently, the web-app and engine work exactly as expected, so there is a 99.9% chance no more debugging will be needed once the final two muxes are done.
Once the muxes are debugged we are ready for demo, and the next week will be spent on the video and on the final report.
ABET:
Unit Tests:
Engine:
Basic board positions to insure all suggestions are legal moves. Found error with how passes were signified on a 9×9 board, pass was changed to be signified by an index of 81 and not 361.
Complex board positions to insure engine maximized or minimized depending on whose turn it is (minimize for black, max for white). Found error where exploration wasn’t inverted, so for black’s moves the optimization wasn’t working correctly. Fixed.
Physical Board:
Sensors tested manually when disconnected from board (i.e. only connected to Arduino) to make sure they would fit our purposes. These ended up having thresholding issues, which caused our change from 1 megaOhm to 10 megaOhm resistors in series with the photoresistors.
Tested multitude of board positions to ensure the correct board state is sent to arduino. Found issue with muxes, which is currently being debugged.
(Each intersection was tested individually)
Tested each individual button to make sure each signalled the web-app in the expected fashion.
Web-app:
Tested input states to make sure they were rendered as intended.
Tested responses to RPi signals (from Arduino) to ensure intended behavior.
Pytest suite for endpoints and web-socket.
Integration Tests:
Web-App -> Engine:
Tested interactions to make sure a prompt suggestion is delivered while also making sure all suggested moves are legal (implying the sent state is processed correctly). This identified a secondary issue with how passes were being conveyed which was again fixed.
Timing analysis was performed to be sure that the engine and communication components complied with out use case requirements.
Board->Web-App:
Extensive unit tests comprising of setting up the board and making sure the exact state on the board is the exact state on the web app. This caught issues with the muxes, which are currently being debugged, so I can’t give a super detailed writeup on the solution yet.
Nathan’s Status Report For 12.9.23
I am happy to say that not only is the engine fully ready for demo multiple days ahead of time, but also that the improvements from the MCTS training run in the past week were much larger than I originally anticipated.
Before switching to 9×9 board, the original (initial trained) version of the policy network had just above 1% accuracy. While that sounds extremely low, it in fact meant the policy network identified the “best” move in the position 4 time more often than randomly guessing (with 362 options), plus, there is a much higher chance that the “best” move is in its top 5 or 10 suggestions.
The second version, trained exclusively on 9×9 data generated from my MCTS runs, had an accuracy of around 9%, which represents performance about 8 times better than randomly guessing, as for 9×9 there are only 82 possible selections, not 362. With each increase in accuracy, the expansion factor of the tree search (i.e. how many candidate moves are considered from each node) can be reduced, as the probability that the best moves are some of the stronger recommendations of the policy network is higher.
Finally, with the third version, I was expecting something around 20% accuracy, however, much to my surprise the measured accuracy (on separated validation data) was just over 84%. Though this is probably not due to overtraining (due to the network architecture having multiple systems to prevent this, and considering the performance on “unseen” validation data), I suspect some of this marked increase is due to the policy network essentially predicting the value network’s response, with an extra layer of abstraction. That is, if the policy network identifies what traits in a position the value network “likes”, its suggestions will line up more evenly with the value network’s evaluations. However, this is indeed the point of MCTS, as assuming a degree of accuracy in the value network (which I think is safe due to the abundance of training data and past performance), the policy network’s job is to identify candidate moves that may or may not result in the best possible positions. Thus fewer candidate moves need to be explored, and deeper, more accurate simulations can be run in the same amount of time.
This 84% model is the policy network that will be utilized by our engine during demo, however, I am starting a simulation run tonight, whose results (if better), will be used in our final report. The engine is fully integrated onto the web app backend, and works exactly as intended.
Added note, the code for the engine itself (i.e. lacking the code for simulation which can be found on the Github I linked earlier in the semester) can be found here.
Hang’s Status Report For 12.9.23
This week most of the time was spent wrapping up various parts of my part of the project as well as integrating the different components together. Once Nathan was done training his new engine, I hooked the new engine to the backend server which was pretty seamless since I had an older version of his engine already hooked up. I’ve had to change how I save the game states to deal with captures in an easier way by simply reading in the game state from the physical board, instead of checking for the new move(s) from the read in state. This means that I had to save the board state at each move, instead of saving the move number in each of the board positions.
For integrating the physical board, there were a few issues I had to resolve in order to get the integration to work. To read in information from the serial port on my Flask server on the RPi, I would have to have while true loop that constantly checked the serial port to see if any new data has been received, however, Flask typically doesn’t allow for this type of structure, so I had to spawn a new thread that did this check. Whenever this thread finds that the Arduino has sent new information, the new information is emitted to the web application via the “update_board” websocket. If the Arduino/physical board requested for a move suggestion, the request is emitted from the RPi to the web application via the “update”board” websocket, the web application then makes a request to the game engine endpoint to get the recommended moves, the recommend moves are then emitted back to the RPi via the “recommended_moves” websocket, and then the Flask server on the RPi writes the recommended move to the serial port.
I’ve also spent some time helping Israel construct LEDS on the board in order to speed up the integration process.
My progress is currently on track: we’ve tested communication from the Arduino to the RPi and communication from the RPi to the Arduino (verifying info with minicom serial monitor). The only item left is to replace some mux components on the board since they were short circuited.
Israel’s Status Report For 12.9.23
Tasks completed
Completed installing the components on board and proceeded on testing, Finalized communication and integration with Hang for Advice polling and sending game state. Troubleshooted Arduino code as well as photo resistors for each of the segments in our board, integrating buttons into the board.
Progress status
Made large progress as I needed to start fresh on board development 9×9. Became behind schedule and still slightly so as I expected to have the board perfected by Thursday.
Tasks to complete
Finalize the testing of our board: tweaking the threshold values and perfecting the game state interpretation. Also in the process of redeploying some components as short circuiting as made them faulty.
Team Status Report For 12.2.23
A hardware risk that ended up occurring was completing the 19×19 board in time for the demo. As such, we decided to change our design by downscaling our board from a 19×19 grid into a 9×9, making the board around 4x smaller. This change also affected the software component and the engine component for the project. On the software side, the data structures holding the board states had to be changed to accommodate for the smaller board size on both the client side code and the code on the raspberry pi server and the backend server.
This created some risk for the Engine, as all the planning had been for a 19×19 version, including the training for the value network and initial training for the policy network. It was decided after deliberation that we would retain the 19×19 network architectures, but adapt their usage to fit a 9×9 board. This involved tweaking the engine so it converts 9×9 inputs into 19×19 via padding, allowing the networks to run as normal. Additionally it required a refactoring of the MCTS code to run 9×9 simulations. These are necessary, as switching the network to optimizing for 9×9 hurts its relative strength, so extra data points are needed to correct this.
As a quick note, the server and backend needed to be adjusted to fit the 9×9 board, but this was done very quickly and easily.
Our new schedule is shown below, and most of the changes are around adapting our system to the new 9×9 board:
Nathan’s Status Report For 12.2.23
Some unforeseen issues caused me to deviate a bit from my expectations for the week (i.e. what I said I would do in my previous status report). After extensive consultation it was decided that we would change the board from its original size of 19×19 to a small size of 9×9 to aid in construction time reductions. As such there were a few extra tasks for the week, that I will go into more detail on later.
Task 1: Multi-machined MCTS. In the past week(s) I have been running MCTS near-continuously across many of the ECE number and lab machines. This allowed me to collect around 150,000 data points for tuning, bringing me to
Task 2: Policy Network Initialization. With the data generated through MCTS I was able to train the initial version of the policy network. This is more useful than just being an accuracy increase, as an increase in policy network strength means the expansion factor of MCTS can be reduced to maintain the same level of strength over the same simulation depth. That is, because the suggested moves are better on average, fewer possibilities need to be explored, and thus execution time decreases.
Task 3: Converting the engine to 9×9 usage. The change to a 9×9 board required a change in the engine as all the networks were set up to take in a 19×19 vector instead of a 9×9. This required a small amount of refactoring and debugging to make sure everything was working as intended.
Task 4: Converting MCTS to run as 9×9. As previously mentioned the engine has been converted from 19×19 to 9×9 to conform to the physical board changes. Unfortunately, this reduces the engine’s relative strength, as the value network and first iteration of the policy network were trained on 19×19 data. Accordingly, I refactored the MCTS code to run MCTS simulating 9×9 games, which will generate more specialized data to tune both networks.
Accordingly, aside from prepping for final presentations and demo, I will just be running MCTS in parallel across machines to generate extra tuning data for both networks. The engine works as is, so this improvement is all I have to work on until demo.
Hang’s Status Report For 12.2.23
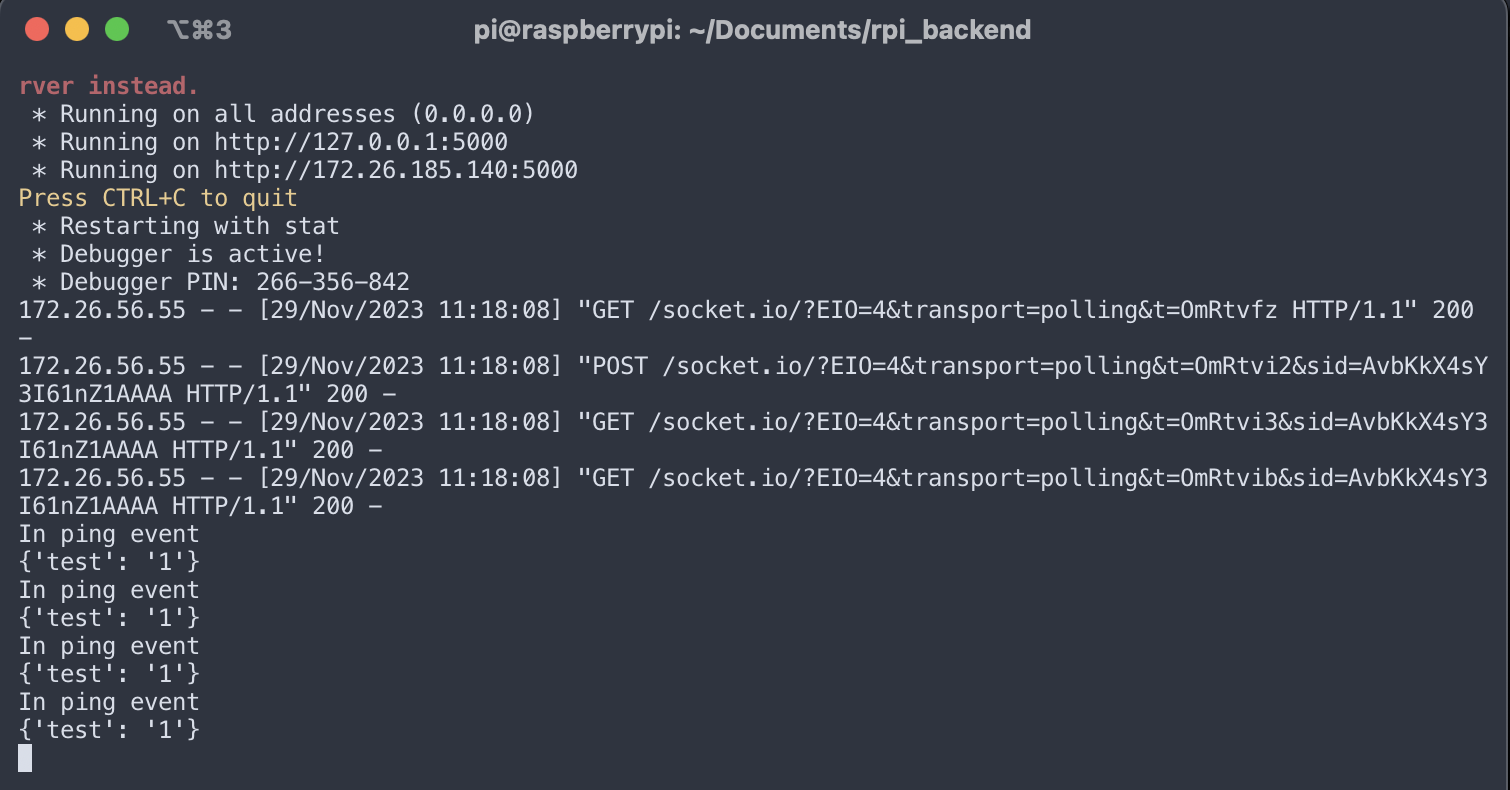
This week I was working on setting up a flask server on the Raspberry Pi, so that we can set up a websocket for wireless bidirectional communication between the physical board and the web application instead of wiring the Arduino to a computer. I had to spend some time setting up the Raspberry Pi in headless mode so that I could simply SSH into the machine instead of setting up a monitor and keyboard each time, and once that was done, I started moving the websocket code from the original server code into the Raspberry Pi. The image below shows the flask server being hosted on the Raspberry Pi, and the communication between the web application and the Raspberry Pi.
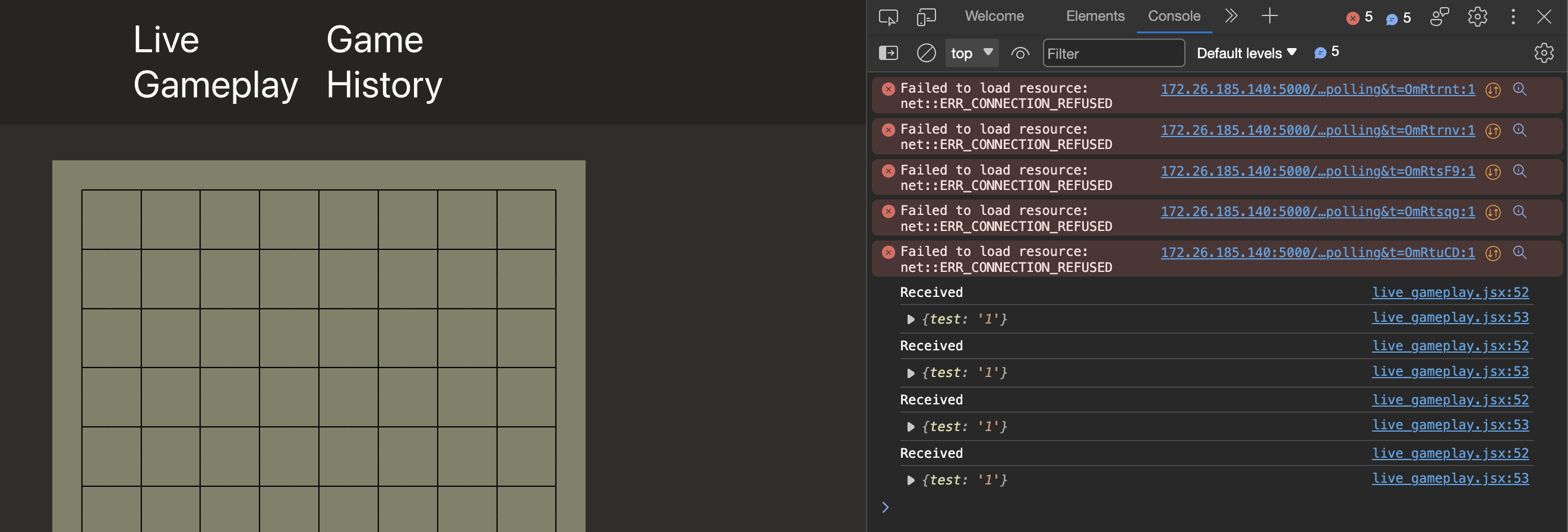
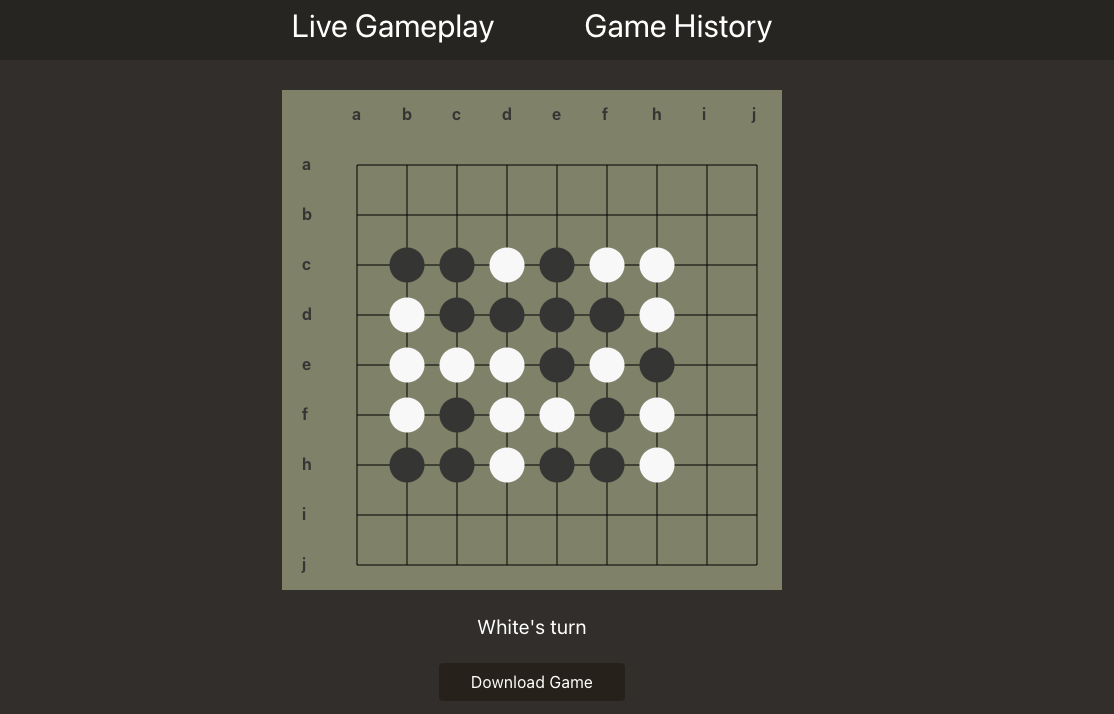
Since we changed the board to accommodate 9×9 games instead of 19×19 games, I had to change some parameters in my code to fit the new board. While I was working on this change, I also added row and column labels into the board, so that it is easier for players to read the recommended game moves when the row and columns are listed. Below shows the new board/ui.
I’ve also added the engine to the backend server, so the backend server is almost completely finished now as it takes in a game state and returns the top 5 moves with the probability of winning associated with each move. The only thing left for the backend server is to update the final weights once our new engine is completely trained.
The progress on the software is on schedule. The only important item left on the software side is setting up serial communication between the Arduino and the server on the Raspberry Pi, but this is currently bottlenecked by the completion of the physical board.
By next week, I’ll polish up some final visual items on the web application, and finish setting up serial communication between the Arduino and the server on the Raspberry Pi.
Israel’s status report 11.12.23
Tasks completed
I have completed making the interior board lifter that we plan to have support our vector boards to be close to the board. We had laser cutted the acrylic board and the H wood supporter. In addition, I tested the optimal resistor choice to use in series with the photoresistor in hand given the holes we have on the board.


Progress status
Even though I have developed the foundation to support the vector board and circuitry, the photo resistors will not be able to get a correct consistent value for all wholes as it can not be stationary in the hole. I will need to add spacing into the board itself to support the photo resistors to be in the holes and be all consistent.
Tasks to complete
I need to finalize the internal layout of the board to support the vector boards near the top panel of the board. Because I need to have different constant resistors for our photo resistors. In addition, I need to make holes into the board so the photo resistors can fit into the wood panel. I also need to add holes for the buttons to be placed into the board itself.
Team Status Report For 11.18.23
Hardware:
There have been quite a few design changes made with regards to the hardware component. The main differences from the previous design iteration are that wires will replace the vector boards, and the instead of being located on said vector boards, the light sensors will be located on the wooden planks themselves. With regards to its development, we are still wiring sensors which is taking longer than expected due to design changes. This is also affecting the planned interfacing with the Raspberry Pi. This is the main risk for our project at the moment, as to mitigate it, Hang has started to work on the hardware component along with Israel, in order to reach the interfacing stage faster.
Software (backend):
We have a slight change in design for the software backend. After consultation with Prof. Tamal, we have decided to implement the communication between the Arduino connected to the physical board and the web server via a Raspberry Pi, instead of using the user’s computer. This will be done by hosting a Flask server on the Raspberry Pi itself. However, before this can be implemented Hang will continue his work helping Israel with the hardware component, as that has proved to be more complex than expected and thus requires more manpower in order to be finished in time.
Software (Engine):
The engine has come together nicely, and is in full working order, and is currently running MCTS in order to tune both the value and the policy networks. However, as mentioned in Nathan’s weekly report there is a bit of a risk in the execution speed of the MCTS. This does not threaten the existence of the engine, the engine already works as is, and can be used. However, the faster and more efficient the MCTS implementation is, the more scenarios can be examined in a given amount of time, and thus the more accurate the engine can play (assuming the evaluation skills of the network are not harmed in the speedup). Thus Nathan will continue working on improving execution to allow for deeper simulations. At some point, he may also need to evaluate the tradeoffs in reducing the network complexity to improve MCTS timing, as the increase in allowable depth could outweigh the network accuracy loss.
Schedule:
Other than Hang, whose changes are detailed above (helping with the hardware) there are no schedule changes. Because Hang is ahead of schedule this added workload will not cut into his slack, and this added help will allow Israel to stay on schedule.
ABET:
We’ve definitely gotten a lot better at working together as a team as the semester has proceeded. At first, we did all of our work together, in person. This had quite a few limitations, including timing and interest levels. We began expanding the ways in which we work together. Sometimes when working on collaborative efforts (ex. team reports, design documents, etc.) we work remotely but synchronously connected over a voice call. This allows us to communicate effectively while still being in the comfort of wherever we choose to be (usually at home). We’ve also gotten better at working asynchronously. Our project sections (hardware, software, and engine) are fairly disjoint, so we spend a lot of time working individually, however, there are obviously times when we need to consult each other on how parts interact. We have gotten good at doing as much as possible while leaving a generalized interface, prevent blockages while still making interaction efficient and easy. Finally, due to the recent overlap in jobs (Hang helping on hardware) all of us have had to learn a bit more about how the hardware works, and Israel has done a great job teaching us so we can help him out.