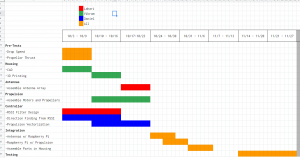
This week I helped with the slides for next week’s presentation and the pretests we conducted over the weekend. I created a block diagram using a third-party software and redid our Ghant chart in response to the feedback we received during proposals. I set out to be as specific as possible at this stage of the project, given that we have developed our device design more according to the specs of some of our parts. Over the weekend we integrated the directional antenna with the ESP32 board. We then took several measurements in the grassy area outside Hamerschlag Hall, to check the RSSI measurements.
We were unsatisfied with the direction finding algorithm we proposed earlier. The previous idea was to move in the direction of greatest RSSI by maximum value. After I researched the RSSI quantity further it is actually feasible to get the exact angle of the direction then vectorize that quantity among the three propellers we will have. This will add more precision to the programming portion of this project, with very little added computational complexity. These and other more descriptive tasks were determined this week, like the need for a digital filter. We plan to do more pretests in the coming week when our parachutes arrive.