At the beginning of this week, I mainly helped the team work on the final presentation. In addition to working together on deciding slide content and layout, I personally worked on data analysis to extract latency values of various parts of our system. We had previously recorded various slow motion videos in an attempt to measure latencies of core parts of our system; for example, to find the time from the Arduino sending a PWM value to the motor to actually seeing motor movement, we recorded a video with the motor in the frame, and an LED that would turn on when the PWM value was sent. These videos all included a stop watch in the frame to keep track of time. In order to extract the latency values for this, I imported the videos to iMovie and went frame by frame, writing down the two time stamps of when the LED turned on, and when the motor actually spun. The difference between these was the latency for this part of the system. I recorded these values on a Google Sheets and found the average of all the runs we did.
I then created a slide in the presentation to show where these latency values fit into the overall system, showing a block diagram of the major steps of the system, and the latencies between them. After this, I also helped the team record a quick demo video demonstrating the camera to propulsion pipeline.
Later that week, we started working on finalizing the laser cut and 3D printed housing. Vikram and I glued the walls to the floor on the base of the housing using hot glue, and I also soldered 16 AWG gauge 2 mm to 3.5 mm adapters for the motors to be able to connect them to the ESCs.
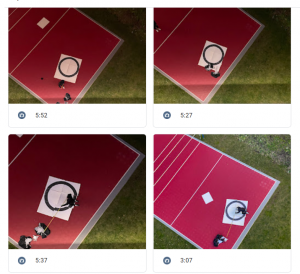
Lastly, we spent the end of the week testing our full system. As usual, I would hold the device and drop it as Lahari initiated it and Vikram caught it down below. Since this testing would be used in the final report, I took a picture from above after every drop, and recorded the distance the device was away from the target that Vikram measured. During our drops, we encountered an issue where the unstable WiFi connection on the Pausch bridge meant that SSHing into the Pi and running the CV script could not be done consistently, thereby lengthening the time for each drop as we had to wait for the Pi to reconnect to the WiFi. To fix this issue, we went back to the lab and I edited the Python script on the Pi to run once the Arduino sends a particular message to it over UART. This meant that the Pi’s CV portion of the script would only start once the button connected to the Arduino was pressed, thereby allowing us to stop relying on a stable SSH connection as we could run script while we had a WiFi connection, and the Pi would simply wait for the button press to begin. I also tried to make the script run automatically after the Pi booted up, such that we would never even have to SSH into the Pi; however, some issues regarding the version of Python the .bashrc file was using meant that our script could not run properly.
We dropped 7 times, and while wind was an issue at certain times, we managed to get our first drop within the target foam-core rectangle, around 50 inches from the center of the target. Additionally, as it got darker, detection got weaker. Lahari and I changed the threshold of the CV algorithm, allowing us to keep dropping in darker conditions.
We will continue testing the system in the coming week, as well as record our final video.