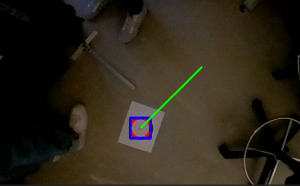
This week we finished up the interim demo and continued testing to improve the propulsion system and computer vision. At the end of last week, we finished integrating the Raspberry Pi with the Arduino in the prototype we have been working with. On Sunday we finished the integration phase by calibrating our software to respond to a circle target placed below the device (where the camera is pointed). We found that the camera feed was off center. That is, the center of the frame was not exactly directly below the camera. This would have been an issue later because when the target is near the frame’s center, we want to fully deactivate the motors. Another issue was that we had to assign one of the motor directions as the origin, or 0° point. As it was, the direction derived from the computer vision was not synced to the direction of the motors. To correct for both of these problems we added an offset of about 30° to the angle and 200px to the center inside the circle detection script.
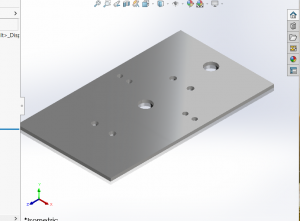
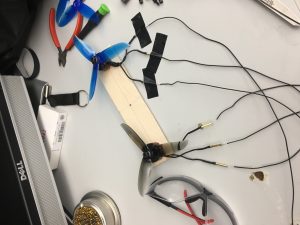
After the demos were completed we prioritized working on our propulsion thrust because it was not enough to get our device moving enough. We fabricated another thrust testing apparatus to measure the amount of thrust being produced.
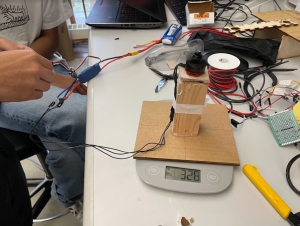
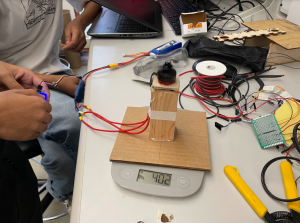
The propulsion is exerted down onto the scale and originally measured 330 grams. We theorized that the low gauge of our wires was inhibiting current from the ESC to the motors. When we replaced these connectors with thicker ones, the thrust was 400 grams. Another measure we took was adding 600 grams of gravel to the inside of the device, as a weight. This was meant to increase the tension in the parachute straps, to reduce swinging. We did a drop test with this setup and the swing was reduced, but our propulsion was still insufficient. We found after returning to the lab that the battery was low on charge. We will be trying again with increased propulsion tomorrow, weather permitting.
Thrust test with low vs high gauge wires:
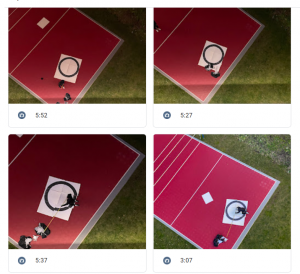
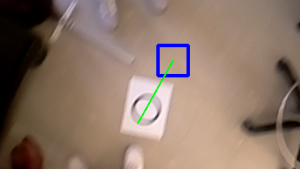
Lastly, we held the camera over the Pausch bridge to see if our detection would work after all the changes we made over the past two weeks. This week, we reduced the shutter speed to reduce motion blur. This change increased the detection rate from about 35% to about 90% in the indoor setup. We found that the circle was too small in the camera feed when held from the 43’ height. We are working on two avenues to fix this. One is to print a 2-meter circle instead of the 1-meter target we have now. The other method is to enlarge the usable portion of the fisheye image or correct it to be equirectangular. Our mitigation strategy for this area is also to start testing on a USB webcam, which will altogether remove the issues we face with a fisheye lens, but add more weight.
Note the lack of motion blur with the faster shutter speed, both frames taken mid-swing:
1500 microsecond exposure time
9995 microsecond exposure time (circle is not detected!)