
This week, after the proposal presentation I focused on two major fronts; starting the design phase of our project and reviewing and coming up with answers to feedback we got from the presentation. On the design front, I helped the team find options for off-the-shelf components for our antennae perception system, as well as motors for propulsion. These motors ranged from brushed DC motors without speed control to brushless DC motors that need designated speed controllers, like those used on drones. Picking the right propulsion will depend on thrust values, weight, and power draw. Correctly spec’ing the motors will be very important for ensuring our ability to maneuver during “flight”. This involves putting together spreadsheets with those requirements spelt out, especially with regards to weight, as that impacts our drop time. Thrust will be hard to measure as well, without being able to empirically determine how much is needed. Right now I am on schedule, hoping to start pre-tests with antennae and perhaps motors in the coming week. Hopefully be the end of next week we will have preliminary results on the ALFA directional antennae we ordered, and if they will work for our direction-finding system.
Team Status Report for 9/25/21
This week we researched directional antennas and accompanying boards. We were looking for antennas that were small enough that could fit on our device and strong enough directionality for our purposes. We looked at EE forums to find one that would suit our use case. We then searched for these products on Amazon. We considered multiple approaches on how to get the RSSI. One idea was multiplexing between antennas, but this might result in higher latency. We arrived on individual ESP32 based boards, one per antenna, these act like Arduinos so we can get RSSI from existing libraries.
With the single computational unit, RSSI retrieval of the several directional antennas will happen sequentially. So a risk that we have discussed at this stage is latency when computing RSSI. Our risk mitigation plan for this issue is to implement a multithreading system or reduce the number of antennas.
No design changes or schedule changes so far. We are on track, contingent on the materials we ordered working for our project.
Lahari’s Status Report for 9/25/21
This past week, our proposal presentation occurred on Wednesday, so I spent the first half of the week practicing. Mainly I familiarized myself with the slides and focused on explaining our visuals and calculations in an organized manner. Our group received feedback regarding the slides yesterday via Slack. Overall, some helpful questions were brought up both in the comments and in the Q/A portion of the presentation. For example, whether we were considering other steering systems and the tradeoffs associated with them. In turn, I am researching other methods of steering like compressed air, and how they would affect the device’s weight and robustness (against weather and other confounding variables).
After the proposal presentation we ordered some parts to try out. Namely, we ordered one directional antenna and a chip to control the signal reception on the antenna. We expect to be able to compute RSSI and find out the range of our directional antenna. Hopefully, these items will meet the needs of our perception task.
Daniel’s Status Report for 9/25/2021
This week, I focused on two main tasks. Firstly, leading up the design phase of our Capstone, we had to begin ordering materials to begin testing our antenna approach. Specifically, after group discussions about how we should have the antennas interfacing with the main compute (to be able to grab RSSI), I researched online for a WiFi capable chip that not only had an external antenna connector (such that we could connect our directional antenna to it), but also a serial interface over USB for easy programming and debugging. Importantly, it had to be able to get the RSSI of the WiFi signal so that we can plug in our directional antennas, and sense the signal strength. We landed on an ESP32 board with a physical micro antenna connector (it comes with a converted to an RP-SMA connector) , and a USB serial board that hooks onto it. I submitted the order forms for this as well as the Antenna.
After we got feedback about our proposal presentation on Wednesday, I read through it and started looking into the NRF24L01 board suggested by the instructors as a possible alternative to the WiFi approach we laid out in our proposal.
Team Status Report for 9/18/2021
As of today, we finalized our proposal for the presentation next week. This involved several kinematic models which we created earlier in the semester to better quantify our requirements.
One of the most significant risks we predict for our project is its ability to perceive the target and activate propulsion with minimal latency. We anticipate that the system will need some time for movement in between perception tasks (receiving and processing a signal from the target). The device may not move fast enough if the perception tasks are to close in time. We will manage this risk as we write the software for these perception tasks. This pause will be something to take into account when programming the device. We will also make sure directional antenna signal processing will require a small compute time. Our contingency plan would be to switch our perception method to computer vision, to detect visual markers on the ground.
No design changes or schedule changes have occurred yet.
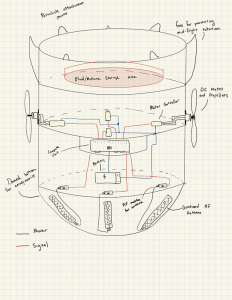
Below is a drawing of our preliminary design:
Daniel’s Status Report for 9/18/2021
This week, I sat with my team and helped brainstorm and do the necessary calculations to figure out certain requirements of our project, such as lateral drop distance as well as landing accuracy. These are crucial to estimate how we expect our device to behave, and what design considerations are relevant to make it behave in the way we want. I also personally worked on the proposal slides for the upcoming presentation this week. I had to distill all the information we came up with during our calculations and group discussions into an easily understandable format for the viewers. This involved summarizing our project problem statement and solution in such a way that the audience understands why our device exists. Additionally, calculations had to be summarized and combined alongside diagrams to properly explain how the project works, why the requirements we chose make sense, and why we expect it to work (by explaining the kinematic calculations we worked on this past week).
As of right now, I believe we are on schedule as we have finalized the project idea, as well as core requirements. As for next steps, we are going to begin the design phase of the project. We will begin experimenting with water bottles attached to parachutes, as well as antennas to figure out certain design elements of our final device, such as which type of motors are appropriate as well as antenna setup.
Lahari’s Status Report for 9/18/2021
This week we have been preparing the proposal presentation for the upcoming week. In order to quantify the requirements of our project, we have been researching current technology related to our topic and modelling the kinematics of our device in action. Personally, I have been editing the proposal slides and typing up the equations we used in LaTeX for readability. I also looked around for potential drop sites around campus in person and on Google Maps.
Vikram’s Status Report for 9/18/2021
This week, I worked on the proposal presentation with my team. I focused on some of the numerical aspects of calculating our requirements, as well as some of the updated drawings for the proposal. The calculations are important because they have to support our quantitative requirements, and the drawings because they can convey a lot more information about the physical footprint of our project than a description.
So far, I think we are on schedule. The next phase, design, will be important for us, especially for testing some subsystems so we know that they are viable avenues for implementing on our system.
In the next week, I hope to have a more clear idea on the individual parts we are looking for, in order to get a close estimate for the weight and function of our device.
Hello world!
Welcome to Carnegie Mellon University: ECE Capstone Projects. This is your first post. Edit or delete it, then start blogging!