This week I wanted to test the code for the color tracking algorithm I coded up last week. I was hoping the trackers we ordered have arrived, but there was a miscommunication between us, the TA, and Quinn. I resolved the confusion by contacting everyone and successfully ordered the trackers, suit, as well as the camera. Since I was did not receive the colored bands this week, I had to create my own test cases for testing whether I can successfully filter out the specific color, remove some of the noise, as well as detect the center of the image. I created different drawings on my iPad and was successfully able to get the correct pixels. However, I would still need to test my algorithms on the actual trackers because the colors would need to be tuned for the upper and lower boundaries of the HSV value in order for the filters to work.
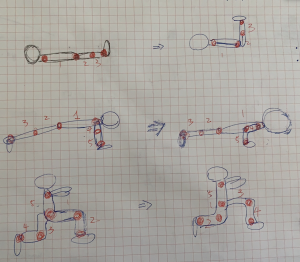
Along with testing the previous algorithms I wrote, I researched and thought over the leg raise, pushup, and lunges that we will be using as our workouts. I drew a diagram of all the joints and wrote down all the lines and angles that can be formed on a google doc. I wrote down the checks and feedback of each position as well. I was able to implement the leg raise posture analysis with some classes and methods in python. The specific thresholds will be fine tuned when we test it on the camera feed. I will still need to implement the pushup and lunges next week.
In terms of schedule, I am fairly on track. I was put slightly behind because of the miscommunication on the orders. I will be able to start tuning the values for the trackers. Next week, I will learn Vivado and HLS with Venkata as well as start determining the thresholds once the camera has arrived.