Here are some pictures of the Batendo project:
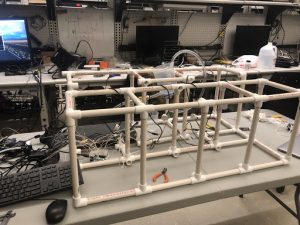
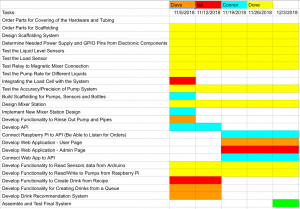
Picture 1: Overall scaffolding of Bartendo

Picture 2: Mixing station of the Bartendo

Picture 3: Sensor system for bottles for Bartendo

Just another Carnegie Mellon University: ECE Capstone Projects site
Here are some pictures of the Batendo project:
Picture 1: Overall scaffolding of Bartendo
Picture 2: Mixing station of the Bartendo
Picture 3: Sensor system for bottles for Bartendo
Click the link below to take a look at our poster for the Bartendo project.
Bill:
I helped out with hanging up the components on the scaffolding, and worked on sealing a hole that we accidentally poked in the tubing. Then I connected the 4 new liquid level sensors that arrived this week to the Arduino, and changed the Arduino code to read from all four of the sensors simultaneously. I also had to change the code for communication between the Arduino and the Raspberry Pi to account for the extra data that we now have to send over. After I got those to work, I moved the platform with the load cell, the Arduino, the Raspberry Pi and the liquid levels sensors into the scaffolding. Afterwards, I tested the whole system again to see if it still worked. Then I connected the new power relay we got this week to the Arduino, and changed the Arduino and Raspberry Pi code to account for it. Then I tested the power relay to test if it could be controlled using the Arduino. Everything worked well together, so now we just have to hook up the new pumps we received, and test the web app to see if it can be used to send orders to the system.
Next week, I will work on ensuring the stability of the system through testing and help create the wooden casing for the system.
Connor:
This week, I completed the API and deployed it to Heroku. We were initially thinking about using AWS ElasticBeanstalk, but due to the simplicity of a Heroku API, we went with that instead. We also plan on doing the same for the web application.
I was also able to test out the API. As you can see below, I have tested out one of the endpoints from the hosted API on Heroku using an API testing client.
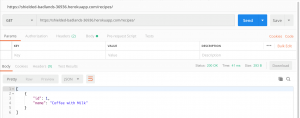
I also have begun hooking up the web application to the API. I was able to retrieve data from the API to the app, such as recipes for example.
Next week, I will work on the API (currently one of the endpoints that is needed for Raspberry Pi needs to be done) and tie the API and web application together. I will also finish up any of the UI changes that need to be done to the application.
Dave:
This week I was able to assemble the two hats (solder) onto the RPi and test (and configure) the pumps on the two hats to run them simultaneously controlled by RPi.
Moreover, we did some of the assembly of our system. We were able to connect all the hardware parts, including RPi, Arduino, sensors, mixer, valve, and pumps. Also, we hung up the mixing station and the valve. We were also picking out the final containers for the liquid. You can see that in the pictures below.
For next week, we should finish the encasing of the project and I should finish reading and writing data from APIs with the RPi (as soon as Connor finishes the API).
Overall:
With this being our last weekly progress report, we can say with confidence that we can achieve a demo-able system by this upcoming Friday. The only thing we will probably not be able to fulfill is the drink recommendation portion of the app. However, we had that as a stretch goal from the start. The major components of the system (the hardware, API, user/admin app) should be done. The only design change that we can think of is that we are planning on not using WebSockets but instead HTTP polling to make requests to the API. It’s not a major change to the system, and we feel confident that it won’t cause any hiccups in this last week. While we do have to do a bit of tidying up of the UI, the software portion is in a good state for the demo on next Friday. The hardware has mostly been set up. We do also have to create the casing for the hardware using wood. We are aiming to have the system set up by Wednesday to give us enough time to create the casing for Friday. By having testing mostly finished for Wednesday (for the hardware at the very least), we can provide ourselves with any of the buffer time that might be needed if we were to experience any technical difficulties.
Bill:
Due to the Thanksgiving break and being away from the lab, I wasn’t able to work on the platform.
Next week, I will continue working on getting the cup platform ready and fully set-up. We also ordered more liquid level sensors, so I will work on integrating those once they arrive.
Connor:
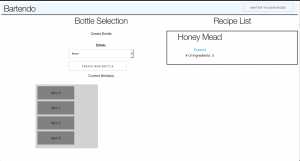
I finished up most of the UI for the admin, as you can see in the screenshot below. Also, most of the functionality of the API is working. I currently have some kind of interaction between the Django API and the PostgreSQL database.
For this upcoming week, I will be moving the web app and the API to AWS to be hosted and accessible by both the public and the Raspberry Pi. I hope to complete this in the beginning of the week. I will also begin hanging both the valve and the mixing station, and once that is done, I also will work on creating the wooden casing for the system (most likely consisting of plywood).
Dave
Over the last week, I worked a bit on getting the integration between the Raspberry Pi and the API ready. Although the API is not yet deployed, I worked getting the Raspberry Pi set up to connect to the API with the models and endpoints that Connor and I had talked about.
The plan Thanksgiving week is to finish the software part on the Pi and after coming back on the weekend, I would mount the two hats and test all pumps together.
Overall:
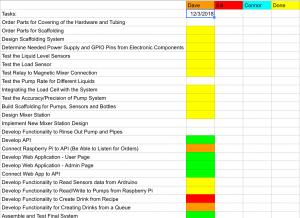
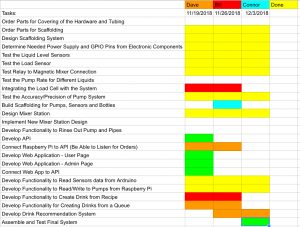
Due to the Thanksgiving break, it was hard for us to work together, because we were physically elsewhere. However, we were still able to get a bit of progress done on the software side of things. While we only have two weeks left of work, our goal is to spend most of the week connecting everything (platform to RPi, RPi to the mixing station, etc.) That way we can spend the last week doing final assembly and testing. There also hasn’t been any major change in the design so that also minimizes that chances of possible problems arising during the project. Here is the updated schedule.

Bill:
I worked on building cup platform by drilling and cutting wood and integrating/screwing the load cell into the wood.
Next week, I will continue working on getting the cup platform ready and hope to finish building it by the end of next week.
Connor:
This week, I continued working on the API and the web applications. I began to work on the admin application, where admins can edit, create, and delete recipes and bottles.
For this upcoming week, I hope to finish both the API and the web applications. Because I will be out of town this weekend and away from the town, I hope to focus on work and finish all the parts of the project that don’t require integration with physical components of the project.
Dave:
I worked on connecting the Raspberry Pi with multiple pumps. I tested out the Pi to simultaneously pumping out liquids with multiple pumps, and the pump rate is approximately the same as we originally tested with a single pump. Also, I have placed orders on all the rest electronic devices. I didn’t have time to integrate the queue and database with Connor, but I would do that over Thanksgiving.
The plan Thanksgiving week is to finish the software part on the Pi and after coming back on the weekend, I would mount the two hats and test all pumps together.
Overall:
We feel that we are in a good position to complete our project by the December 7th, which is demo day for us. If we can complete the pure-software portion of the project by the end of next week, we can focus on finish the integration between the API with the Raspberry Pi, which will help de-risk the rest of the project. We didn’t have any design changes so we should be good on that front. We also have found a source for the wood that we will use for the cover of the system which has helped us greatly de-risk the system. While we still need to complete the rest of the hardware integration, we are increasingly de-risking our project by working on the load cell platform and testing the multi-pump system. Here is our updated schedule.
Bill:
I wrote the code for getting the Arduino to read from the liquid level sensor. Then I combined the code with the code for reading from the load cell, and started thinking about how to send over multiple pieces of data to the Pi over the Serial USB connection. For now, I am just formatting the data by separating them with spaces, and splitting the data up on the Pi side. This method should work even with more liquid level sensors; we just have to make sure the data is ordered properly. Afterwards, I had to make changes to the code on the Pi to properly read from the Arduino. I got it to work with just a single liquid level sensor reading, so once we get the other sensors I will need to change the code a little bit more to read from all of them. Currently, we are waiting to get more pumps, and once we get them I will start working on get the additional pumps connected and running simultaneously.
Until now, we just had all the parts connected directly to the Arduino, but the set-up would not work once we get the rest of our parts, so I connected the parts using a breadboard instead. That also makes things more organized, and easier to mount onto the scaffolding.
I started working on making an actual wood platform, because the cardboard platform we have now is very flimsy and weak. I found a piece of wood that we can use, and drilled some holes into it.
Next week, I will continue building the platform and adding the other pumps to the system once they come in.
Connor:
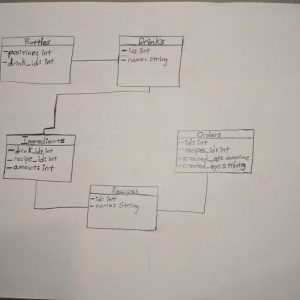
Because Dave is working with the Raspberry Pi in regards to communicating with the API, I also worked with Dave in creating the API interface so that we can. We created a UML database diagram to be clear on what we were developing that you can see below:
We also discussed the RESTful endpoints that would be exposed of the API, as you can see below.
After discussing the above items with Dave, I began writing the API and have made a decent amount of progress on it.
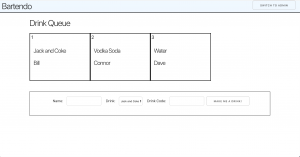
Also, prior to meeting Dave to discuss the UML diagram, I also did a little bit of work with the web application, particularly the user page where users can input drink orders. You can see that current state of the UI below:
Next week, I will finish developing the API and deploy it to Amazon Web Services so Dave can begin integrating the Raspberry Pi with the API to send and receive updates (drink orders, a change in status for the bottles, etc.). I will also work on the web application as well.
Dave:
For this week, I first finished off the demo for Monday, including integrating the Arduino and RPi to put the entire system together to make the whole process from detecting a cup to pumping and mixing the liquid.
Then, because we are using five pumps in total, we would need to stack two dc stepper hats together on the RPi. I soldered the other hat and figured out how to control the two hats separately using different addresses.
Moreover, I have discussed the software design with Connor, as Connor said above. Thus, I have started writing code on the python to read files coded in the way as we designed.
For next week, I would finish control the pumps and sensors based on the input files. Also, I can finish mounting the hats as we buy the longer pins for the RPi from Amazon.
Overall:
With regards to the software portion, we are currently ahead of schedule. We have already made progress on the web application, and we are not supposed to begin working on it until the week following next. We are pushing off the drink recommendation towards the end to ensure that we focus on getting the core system in place. However, we still need to get the hardware set up. We need to hang the mixing station system (beaker and valve) and add the other pumps and liquid-level sensors to the system. Due to budget constraints, we are still figuring out a way to purchase the sensors without dipping into our own personal money. However, we should also get our pumps for the other bottles on Monday so we should be fine on that front. We are also placing great emphasis on looking for ways to avoid making purchases due to our budget. For example, we are hoping to use wood from the “cages” used for booth, and if that is unsuccessful, we are hoping to grab some planks of wood from one of our parents’ houses during the Thanksgiving break. While we have made some changes to the schedule, we believe we are on schedule to finish everything, especially with this upcoming week being a big week for us with a big push prior to Thanksgiving break.

Bill:
I built a makeshift platform out of cardboard.

Then I tested to see if it could detect an empty cup. For this, I just used an empty small size Starbucks cup. Using the Arduino, when I placed the cup on the platform, I was able to detect the cup. Then I hooked up the Arduino to the Raspberry Pi, and had the Arduino and the Pi communicate with each other using a serial USB connection. It was fairly simple, and I managed to get the Pi to read from the load cell.
Next week, I will start working on the functionality of only allowing the system to pour drinks when a cup is on the platform. Also, I will construct the platform so that liquids can pour through it into a basin.
Connor:
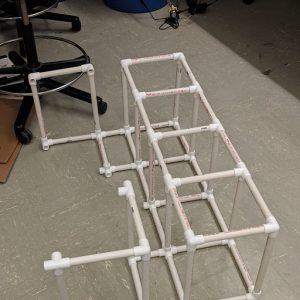
This week, I was able to finish most of the scaffolding. Tomorrow, it will be completed once we hang the valve and mixing station. However, here is a picture of the scaffolding in its current state:
Today, I purchased the adapters that were needed for the valve and the wire and fasteners that are needed to hang the valve and the mixing station. With that said, I attached the silicone tubing to the adapters that we hooked onto the valve, and we were able to pump water through the valve without any major issue. Now it’s a matter of stabilizing the valve as it receives liquids from the mixing station.
For the next week, I will be working on getting the scaffolding set up with the hanging mixing station and the valve. This work will mainly be done tomorrow, as our mid-semester demo is Monday. After our mid-semester demo, I am going to begin working on the API which will be hosted in AWS.
David:
I was working on connecting the Arduino with the Raspberry Pi, so that we would be able to control the relay with from the RPi through Arduino. Also, we would need to read the data from the load cell to the Raspberry too, so that we can control the pumps to pump liquid when the load cell senses a glass.
We worked on the scaffolding of the system and testing out the pump system for the mid-semester demo.
I also worked on the design of the software systems, specifically on the database and drink recommendation system.
For next week, I would need to start implementing the drink recommendation system besides preparing for mid-semester demo.
Overall:
We are in a good position for the mid-semester demo this upcoming Monday. We have everything from a physical standpoint that we need for Monday. We have also made substantial progress on the load cell grate reading from it and being able to determine it’s sensitivity, which seems fine. For tomorrow, it will be a matter of wiring up the various components (Raspberry Pi/Arduino to the pumps, valve and load cell) and writing any necessary software to ensure that the hardware works correctly. We have tested the pumps and the valve, and they have worked as expected. Hanging the valve and the mixing station might be a little tricky, but we made sure we bought enough metal rope for us to test with (various lengths and so forth). After the mid-semester demo, we do need to get started right away with a focus on the software portion, mainly the API and Raspberry Pi recipe-making capabilities. While we might be a little behind, we believe that we should also be fine on that front. With the software, there won’t be any waiting for parts or limitations due to budgets. We can move much more quickly on that front and, as a group, have more expertise in software than hardware.
Bill:
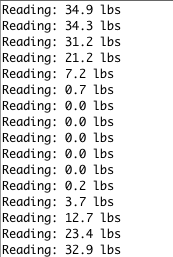
The first HX711 amplifier was not giving me any readings, and I think it might have gotten damaged from the several soldering and desoldering attempts. I decided to just try again with the second amplifier. I soldered a 5×1 female header pin to the amplifier, as well as the leads from the load cell, and connected the amplifier to the Arduino to try and see if I could get reading with the second amplifier. I used the HX711 interface that was provided by Sparkfun, and wrote code that just constantly read from the amplifier in an infinite loop. I managed to get readings from the amplifier, but for some reason, I was getting negative readings despite the fact that everything was connected correctly. After reading up a bit online, it turns out that in the case of the readings being negative, I can just switch the positive and negative outputs of the load cell. I had to desolder and resolder the leads, and that fixed the issue with the signs. I tested the load cell by just gently pressing on it with my fingers.
The readings look like this. The calibration of the load cell is off because I just picked a random value for the calibration. This is not important in our case, as we do not care about the actual weight of the glass. We just need to detect whether there is a glass or not. The next step would be to build an actual platform with the load cell and then test it with some glasses.
The readings look like this. The calibration of the load cell is off because I just picked a random value for the calibration. This is not important in our case, as we do not care about the actual weight of the glass. We just need to detect whether there is a glass or not. The next step would be to build an actual platform with the load cell, and then test it with some glasses.
Connor:
This week, I built part of the scaffolding. We, unfortunately, ran out of the joints needed to build the rest of the scaffolding. You can see that current status of the scaffolding in the picture below:

In addition, we did get in our power supplies and were able to test out the valve, which worked as expected. I also worked on the design for the mixing station this week. Below is a drawing of what we expect to put together.
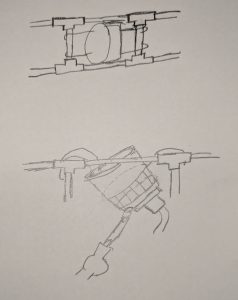
Essentially, the most of the motor that we took apart from the magnetic mixer stirrer is still intact. We will glue the platform that holds the magnets to the bottom of the beaker. From there, we will suspend the beaker in air using metal wires (such as chicken wire). This should allow us to stabilize the mixing motor and the beaker. We will also have a ring of wire go around the top of the beaker to stabilize. In addition, we will drill a hole in the bottom of the beaker to allow liquid to flow out. We will use an adapter to connect the silicone tubing to the valve and the beaker.
For this upcoming week, I will go to Home Depot to purchase some more of joints that we need for our scaffolding. We will also purchase the metal wiring needed for the mixing station. We should be able to implement the rest of the scaffolding and the mixing station by the end of this upcoming week.
David:
For this week, I worked on cutting out the PVC piping and designing/testing the mixing station with Connor.
Moreover, since the power supply came in, I was able to connect the power supply to the hat and program the hat to drive the big pump that we are going to use for rinsing system for certain amount of seconds. I still get I/O error sometimes when driving the bigger pump, and I couldn’t figure out the reason. After reading the specs of the pump and the hat, I think the reason might be the overheating with the chip on the hat. Since our system won’t be in use all the time and the pump was working properly in most of my testings, I think it wouldn’t be an issue in the end.
With some testing, I think we would pump enough water with the bigger pump to rinse off the residue in less than 2s.
For next week, I would prepare the mid-semester demo with the team and start working on the database.
Overall:
At this point, we only have $61 left to purchase parts for our project. While we have purchased most of the parts that we need for our project, that will most likely not cover the rest of the parts that we need to make the project a success. However, we have agreed as a team that we pool from our own money to purchase any additional parts. One thing that we have to address is how to slow down the spinning of the magnetic. We used to be able to control the speed of the spinning of the magnet using a potentiometer. However, the potentiometer broke off once we were trying to get it loose from the casing that the motor was in. We can solder on a potentiometer or a resistor to the motor such that there is less current flowing through the system. On the other hand, we could manually add some kind of weight to the spinner to make it spin slower. While we have laid out these various options and the implementation should be minimal, we need to make a decision in the next couple of weeks. With regards to the overall schedule, we don’t need to make any major change to the schedule and are still on track to complete everything that we need for the project.
Bill:
As you can see in the gif below, we ran an Arduino sketch that turned on the outlet for five seconds and then turned it off for a second and repeated this. Unfortunately, because we did not have the right-sized screwdriver, we had to manually hold the wires from the Arduino to the pins on the power relay.
For this upcoming week, I will be working on constructing the platform with the load sensor using the wood that we got from home depot. The first amplifier was giving me a lot of issues. When I tried measuring the output of the amplifier using a multimeter, it wasn’t reacting at all to the change in weight. We bought another amplifier and load cell, so I will try again with those. It I get those connected up properly, I will then connect them to the Arduino and see if I can get any readings. I already have the code for reading from the amplifier, so as long as I can get the load cell and the amplifier hooked up properly, we should be set. Afterwards, I will look more into having the Arduino communicate with the Raspberry Pi using a USB connection. If I manage to get any readings, I will move on with testing with glasses of different weights to see how to calibrate the cell to be able to detect glasses of various weight.
Connor:
During this past week, I was able to work on beginning to assemble the scaffolding. This involved cutting some of our PVC pipes to the exact lengths that we have specified in our design with a machine saw that we found in the machine shop in Hammerschlag. While I was able to make a few cuts with the PVC pipes that we had bought last weekend, we, unfortunately, did receive the joints that we needed to connect the parts yet. Also, the machine shop was closed this weekend as we needed to cut more PVC pipes that we had bought this weekend. With regards to the valve that we are using for the mixing station, we realized, with the help of our TA, that we didn’t have the power supply necessary to operate the valve. With that said, we ordered a power supply, 12V/5A, to operate the valve. Also, I also did some testing with the magnetic stirrer. We hooked it up to our AC/DC power relay, and it seemed to work as designed. However, we have thought about our design recently and thought that there might be an easier way to handle mixing. Instead of having the funnel hover above the mixer, it might make more sense to have some kind of cup titled a bit sideways and then have the magnet and motor that was apart of the magnetic stirrer mixer attached directly to the bottom of the cup. We would then no longer have the potential issue of the funnel being too far away from the magnetic stirrer mixer to mix the drink. To drain the liquid into the cup, we would make a hole in the cup, caulk an adapter to the cup which will attach to some silicone tubing. I also changed some of the dimensions of the scaffolding such that each bottle resides in an 8” by 8” square of tubing, instead of the original 6” by 6” that we described in our last weekly report.
For this upcoming week, I plan to cut the rest of the PVC piping, since the machine shop is open during weekdays. We should also receive our PVC joints sometime early in the week. With that said, my goal is to finish assembly of the scaffolding (the PVC piping). In addition, I will begin working on finishing the details of our design and the begin the implementation of the new mixing station. We will test some possible ways to keep the beaker slightly tilted (possibly chicken wire).
David:
This week I ordered the three power supplies that we need for our design. We are currently using the power supplies in the lab to provide power for the motor hats, but they don’t quite meet the power requirements for the hat if we are driving four pumps simultaneously. Moreover, we won’t be able to test the bigger pump we had for rinsing system because it requires even more power than the hat. I tested out controlling the pumps to turn on and off for a certain number of seconds. We also tested out controlling the power relay using Arduino, which would turn the mixer on and off, as you can see in the gif below. I was also able to connect the Raspberry Pi with the Arduino and control the Arduino using RPi.
With regards to the rinsing system, since we don’t have the power supply or the pumps yet, we won’t be able to quite test them and make decisions on the design. However, it should have the same mechanism as pumping other kinds of liquid (with or without the stirring part).
We were able to take the stirrer apart and show that the stirrer still works in our new design as Connor mentioned above. The gif below shows how it would work in our design.
For next week, I need to finish testing the pumps and power supplies and decide whether we can use the big pump for rinsing water or not. Also, I should try to figure out how to drill a hole at the bottom of the beaker and find a matching adapter for the hole and the valve.
Overall:
We have made some progress this week in regards to the design of the subsystems. We did make some design changes, which will not increase our total amount by a lot, as well as the mixing station, which has been described above. However, we believe we can finish working on the scaffolding early in the week, which will allow us to begin implementing our mixing station design and provide a nice foundation and visual for the mid-semester demo. While we believe that the new mixing station design will use chicken wire to stabilize the cup and won’t cost a lot of money, we need to begin the implementation process. If we run into issues with the PVC piping, then we can still build the system without a foundation. It will just be more of a hassle, and we may have trouble later on with trying to build a foundation after connecting the inner system. If the PVC piping for some reasons does not work, we also have access to wood in the cages area. While it will be harder to build, and possible less stable, it should be sufficient for our device.
In the following weeks, we are going to try and get the Raspberry Pi to completely control a single pump, as well as the mixer to see if we can get the system working with just a single bottle. We believe that as long as we can get it working with a single bottle, it should not be too much trouble to expand to multiple bottles. The possible problems are with the power and the motor hat, since we will have to power more devices.
David:
This week, I worked on the functionality of having the Raspberry Pi control the pump. I created a python script that was able to turn on/off the pump and also control the flow rate of the pump with PWM.
I tested out the small peristaltic pump on different kinds of liquid and under different conditions.
Water at different voltage(all close to 12V): varies in undefined behavior, but all in the range of 62-78ml/min;
Water with pump at different heights relative to the water level: not much difference (at most 2ml);
Water with pump connect to different pins: not much difference (at most 2ml);
Other kinds of liquid compared to water at the same pins and same voltage: alcohol or alcohol mixed with water (about the same: 2ml difference); soda (I used sprite) (much slower: less than 40ml/min); coffee (cold brew: mixed with honey and cocoa) (faster: about 5ml).
I also worked on testing the other peristaltic pump that we had purchased, which is able to pump liquid much faster but with a lot less accuracy (100ml in less than 2s). The issue with this pump is that the hat doesn’t have enough power to drive the pump, so if we were to use it, we would have to use a seperate power source and a relay to turn it on and off. This pump will be used for the cleaning water as the amount of water that we will clean the funnel with does not need to be exact. I also was able to control two pumps at the same time with the Raspberry Pi. While we still need to make sure that the Raspberry Pi is able to handle more than 4 pumps due to the pin limitation on the hat, this was a good start for us.
For this upcoming week, I will be responsible for purchasing more electronic components for our project. For example, we need to buy three more peristaltic pumps for the drink liquids. In addition, we need to buy a ADC converter for the 12V power supply to the Raspberry Pi HAT.
Bill:
I tested the liquid level sensor. I used a plastic cup filled with water and moved the sensor up and down the cup. Whenever the sensor came in “contact” with the waterline, the sensor lit up, alerting us that it sensed the liquid. I also tested the liquid level sensor with other kinds of liquids. We wanted to make sure that the sensor was versatile enough to be able to detect liquids besides water. We were fairly confident that it would be but wanted to be certain. When we did test it, we found out that the sensor was able to accurately detect the various liquids, except for pure isopropyl alcohol. The sensor sometimes gave false negatives when put on a plastic container of isopropyl alcohol. I tried pouring the alcohol into different containers, but I still having issues with the sensor. I tried diluting the alcohol, and after that the sensor was surprisingly able to detect the liquid, which suggests that pure isopropyl alcohol has some chemical properties that makes it hard to detect.
In addition to testing the liquid level sensor, I also went to Home Depot to purchase the necessary materials for the platform for the glass (where the drink will be poured).
For this upcoming week, I will be working on constructing the platform with the load sensor. I will build out the platform from a physical standpoint and then hook said platform up to a power supply and multimeter to output the change in load on the sensor. If I am able to get done with that, I will go onto connecting the Raspberry Pi up to the load sensor see if I can get accurate digital readings of the weight. I will test glasses of different weights to see how to calibrate the cell to be able to detect glasses of various weight.
Connor:
This week, I designed the scaffolding for the bottles, pumps, funnel, and valve. We are working on the skeleton of the project and will work on the covering in the subsequent weeks. The skeleton of the project will allow us to show our MVP for the midterm demos. Here are the drawings of the design of scaffolding:
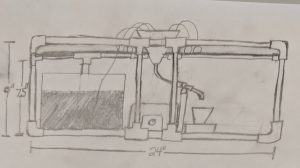
As you can see above, this is the front view of the system. As you can see, you have a basin of water used for the cleaning water. In addition, we have the valve slightly offset from the funnel. The rationale behind this is that we can allow the magnetic mixer stirrer to get as close to the funnel as it needs to mix it while the valve can be clamped to some PVC piping a be a natural position to pour into the glass. If the base of the stirrer is too low for the system to properly mix drinks, we can add a false bottom to it to have it be closer to the funnel and thus the magnetic pill.
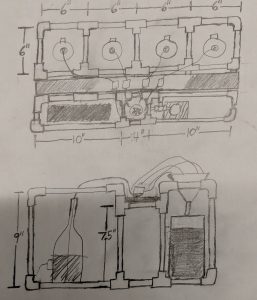
For the top and side views, you can see that we added a plank of wood in the middle of the system. The reasoning for this is to have a place for the peristaltic pumps for the bottles to be situated in such a place that allows their tubing to go to the bottom of their bottles while having access to the funnel.
I also tested the gravity-feed solenoid valve, but I was having some difficulty in getting it to be functional. When I hooked it up to the 12V DC power supply, the power supply would say that it was overloaded and would only output ~2.5V.
Next week, in addition to finish building the scaffolding of PVC piping, I plan on getting the valve to function properly, as in having it hooked up to an external power supply and having it properly open and close. Once I have the valve working, I will then begin working on connecting it to the Raspberry Pi and being able to control the valve from it. In addition, we hope to receive the magnetic mixer stirrer sometime early this upcoming week. With it, I will test it’s connection to the AC/DC control relay and then have it work with the Raspberry Pi and control turning the magnetic mixer stirrer from it. I also plan to design and construct the funnel in such a way that the tubes for the drink liquids and cleaning water can be used in the funnel. This will include drilling holes in the funnel and stabilizing the tubes at such an angle to ensure that they dispense liquid directly into the funnel as opposed to shooting out of the funnel.
Overall:
After the course of this week, we feel that we have made adequate progress. While we have made a decent amount of progress this week, we still need to further derisk certain aspects of our project. For example, we need to ensure that the valve that we purchased is a possible solution. If by the middle of next week we are having no luck in getting the valve to function properly, we will search for a valve that will meet our needs. Also, we need to make sure that we can control and pump multiple liquids simultaneously. To test such, we need to order the necessary parts on Tuesday to get them in as quickly as possible. By getting starting on testing as early as possible, we can increase the margin of error to ensure that we have adequate time to build out the hardware. Moreover, we need to further design the functionality of rinsing using either the bigger peristaltic pump which isn’t very accurate or another peristaltic pump (such as the one we are using for the drinking liquids).
Some parts of our system have been changed and/or elaborated upon, such as the scaffolding, and the explanation for such has been made in our individual responses.
For our schedule, we were able to get all the necessary parts for the scaffolding. However, we are holding off on ordering the covering for Bartendo for reasons that I mentioned above. So in that sense, we will separate this into a separate task and work on it a few weeks from now. On the other hand, we have already begun working on writing capabilities to the pumps and that is showing great promise so we are a bit ahead of schedule on that front.
