Accomplishment of This Week
- Mandatary Lab Meeting (4h)
- presentation and peer review
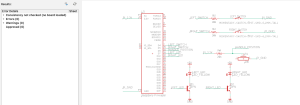
- Finish Schematics (3h)
- update switch connection from 5v to 3.3v since pi gpio are default 3.3V
- Decide on resistor values
- Potentiometer value (P) 20kOhm. Then we have V_divide = 3.3 * R_pot / (R_pot + R_lim). We want to maximize voltage changing rate wrt. R_pot when resistor in middle, which when potentiometer reading (0.5 P) 10k Ohm. Hence we want to maximize first value of the above equation. Then we set R_pot as 10k find first derivative. Then find second derivative wrt. R. Then set the second derivative to 0, which gives us R = 20k will be best. This lead to the center voltage being 1.1V and Max Voltage Read being 1.6V. We will tentativly settle with this. Next week we shall test the noise and the level of accuracy to see if we need to change source from 3.3V to 5V.
- Current limiting resistor 20k Ohm for switch just to be sonsistent with current limiting for handle bar position sensor. 3.3V / 20k = 0.165mA => 0.544mW each gpio pin.
- Decide transistor model.
- Collect CAD file for RPI4 and Lidar and upload to drive (1h)
- Worked on design review slides (4h)
Schedule
- Finished Turn switch schinematics
- No Simulation, (due to simplicity of design)
- Collected CAD model for known parts.
Plan for Next Week
- Test Led circuit on breadboard
- start led cad
- investigate where to get polycarbonate
Documents
- Design Review Presentation: https://docs.google.com/presentation/d/1SZPAp0hjKjvMaDXqi_ao0Otezr_vhDReDnxnfLDB-g/edit
- Updated Schematic
- Voltage Divider Value vs Potential Handle Bar Position Graph
