What did you personally accomplish this week on the project?
This week I didn’t contribute much to the project. #Carnival22
Is your progress on schedule or behind?
Our progress is on schedule. In the updated schedule, we are set to focus on integration until the following week, after which we will be testing our code.
What deliverables do you hope to accomplish this week?
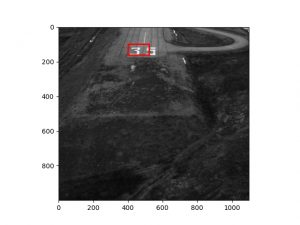
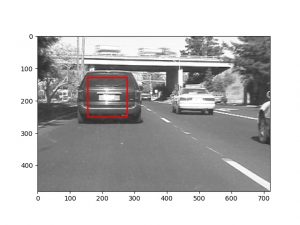
This week I’d like to deliver a mostly vectorized KLT that has been integrated into the Arducam’s API. This would allow the camera to move with its target while cooperating with the second camera to snap an adequate photo of the target. Upon testing the code on some of our videos, I will decide if our KLT made from scratch will suffice or if we should migrate to the KLT provided by OpenCV which would most likely be faster.