
What did you personally accomplish this week on the project?
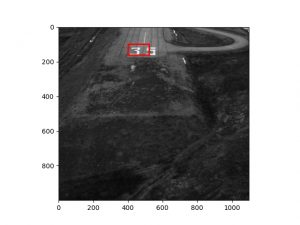
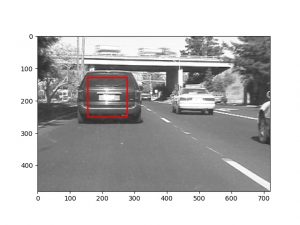
I have been falling behind on the tracking feature’s development and have
just begun testing. Currently the KLT has been tested on three videos consisting of moving cars and a helicopter landing platform demo. The tracker is to maintain the bounding box on the main cars in the first two videos and on the platform’s identification number in the third video. The KLT works successfully for the landing video, but refocuses the bounding box on unwanted targets for the car videos.
Is your progress on schedule or behind?
I am currently behind schedule. This next week I plan on testing the KLT on videos of actual animals in different environments under different conditions such as lighting, contrast, and varying levels of occlusions (which the KLT should be resistant to), the likes of which aren’t too disruptive.
I have yet to fit the KLT to whatever format the arducam records video
instead of the npz format that it’s being tested on now.
What deliverables do you hope to complete in the next week?
By next week, I should have tested the KLT on videos of actual animals and have it work with the video/picture format used for the arducam.