Work Done
This week, I helped out with the proposal presentation slides and did some implementation planning and parts research, particularly for the camera setup. In particular, I made the solution approach and testing, verification, and metrics slides (with input from my team members to make sure we were all on the same page.) Below is the block diagram I developed for our system.
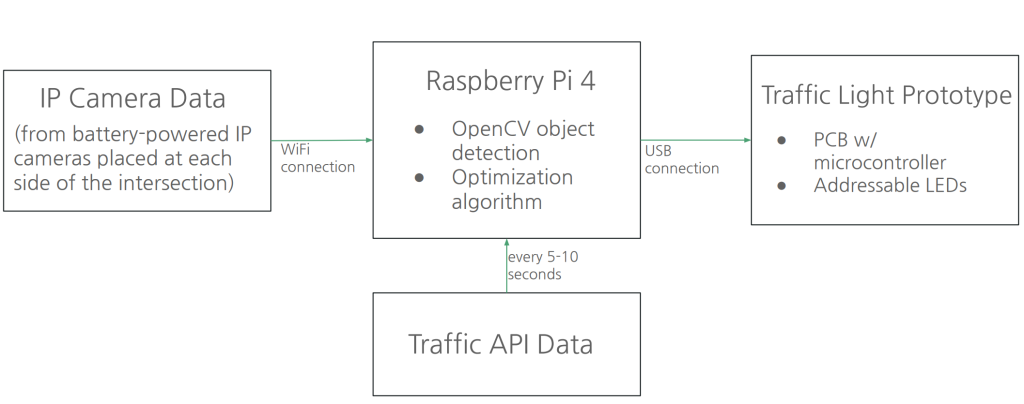
For the rest of this week, I’ve been looking into how we’re going to connect the IP Cameras (which will ideally be at each intersection) to the RPi. CMU’s WiFi is notoriously difficult to connect to with external devices (like an RPi – but that’s been done before. It’ll be a particular pain – if even possible – to connect the IP cameras), but we have a few options. We can potentially connect the RPi to CMU WiFi and use it as a hotspot of sorts that the cameras can then connect to (however, this would probably require us to use an intersection other than Fifth and Craig to test our system.) We can also purchase a mobile hotspot and connect the RPi and cameras to that.
I also looked into BLE camera setups and couldn’t find any substantive projects that were similar in scope to ours. These cameras cannot stream video, and furthermore require wired connections to BLE microcontrollers like the Arduino Nano 33 BLE or ESP32. If we can’t get the IP camera setup to work (the idea is to order one IP camera to start with to see how the setup goes), we will probably default to wired cameras (standard Raspberry Pi cameras) for one or two sides of the intersection and simulate the other sides for demo purposes.
Schedule
Progress is mostly on schedule — I did quite a bit of research on the different kinds of cameras we can use and thought about different ways of putting our whole system together. Before deciding on a camera implementation, however, I want to meet with Prof. Sullivan and Mukundh and discuss the feasibility of what we have in mind. In that sense I am slightly behind schedule as I was supposed to finish up camera research by Monday.
Tasks this Week
- Decide on a camera implementation and get some ordered so we can start setting things up.
- Get my hands on a Raspberry Pi 4 (hopefully there are some in the course inventory) and boot it up, then see if I can host a hotspot on the Pi itself for other devices to connect to.
- Start writing the object detection algorithm for cars and pedestrians and test it on old traffic camera footage.