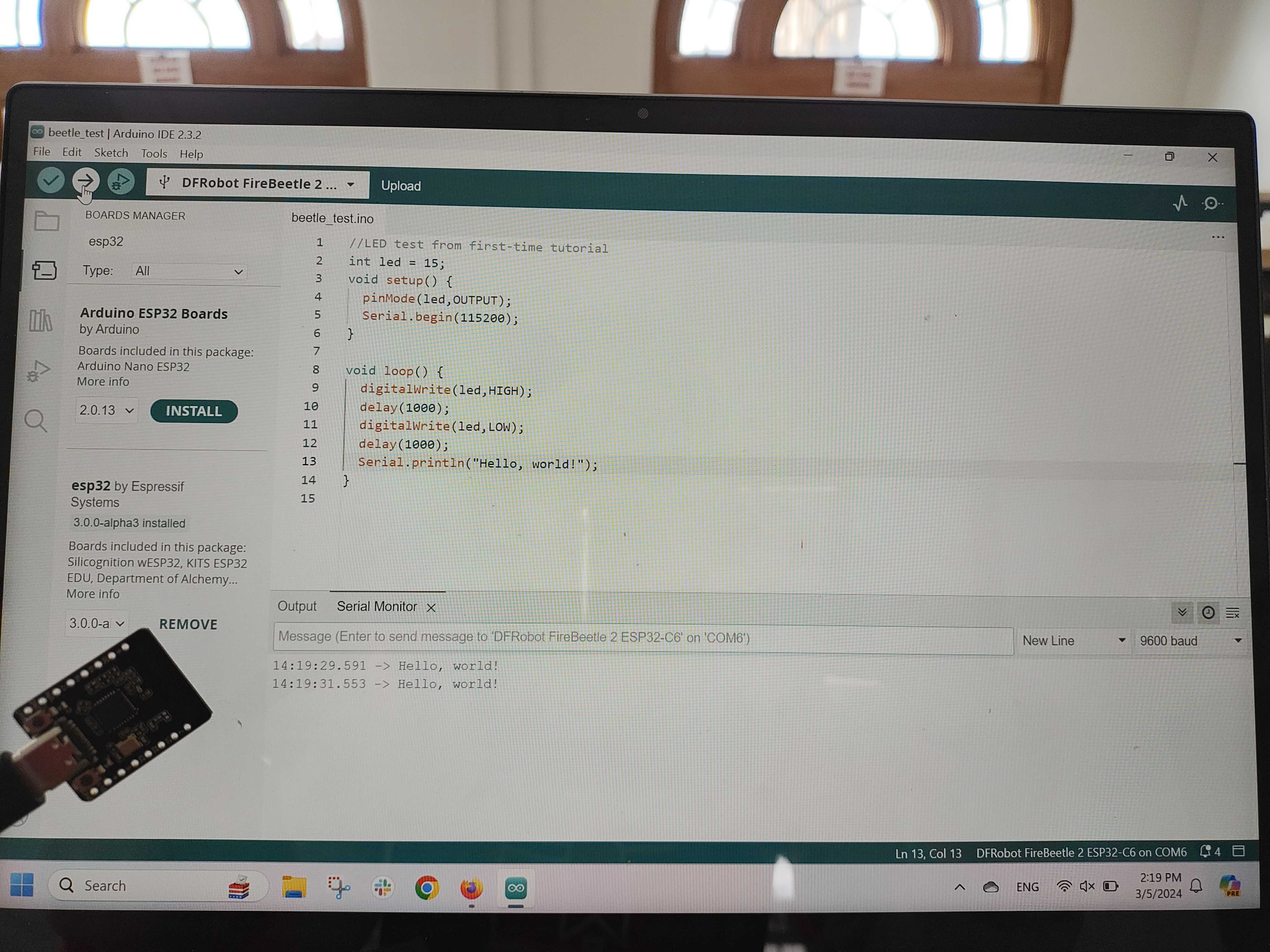
Over the past 2 weeks, I participated in completing the design report, ordered the PCB from JLCPCB (it should arrive in 4-6 business days), and completed the first-time use tutorial on the DFRobot Wiki for using the Beetle to display “Hello, world!”.
I also realized that the circuit diagram I created for the design report did not mention its sources; it was compiled based on diagrams from the AKU1126 acoustic microphone datasheet, Beetle pin diagram/definition, NeoPixel (SKC6812RV) datasheet, and Pololu boost converter description.
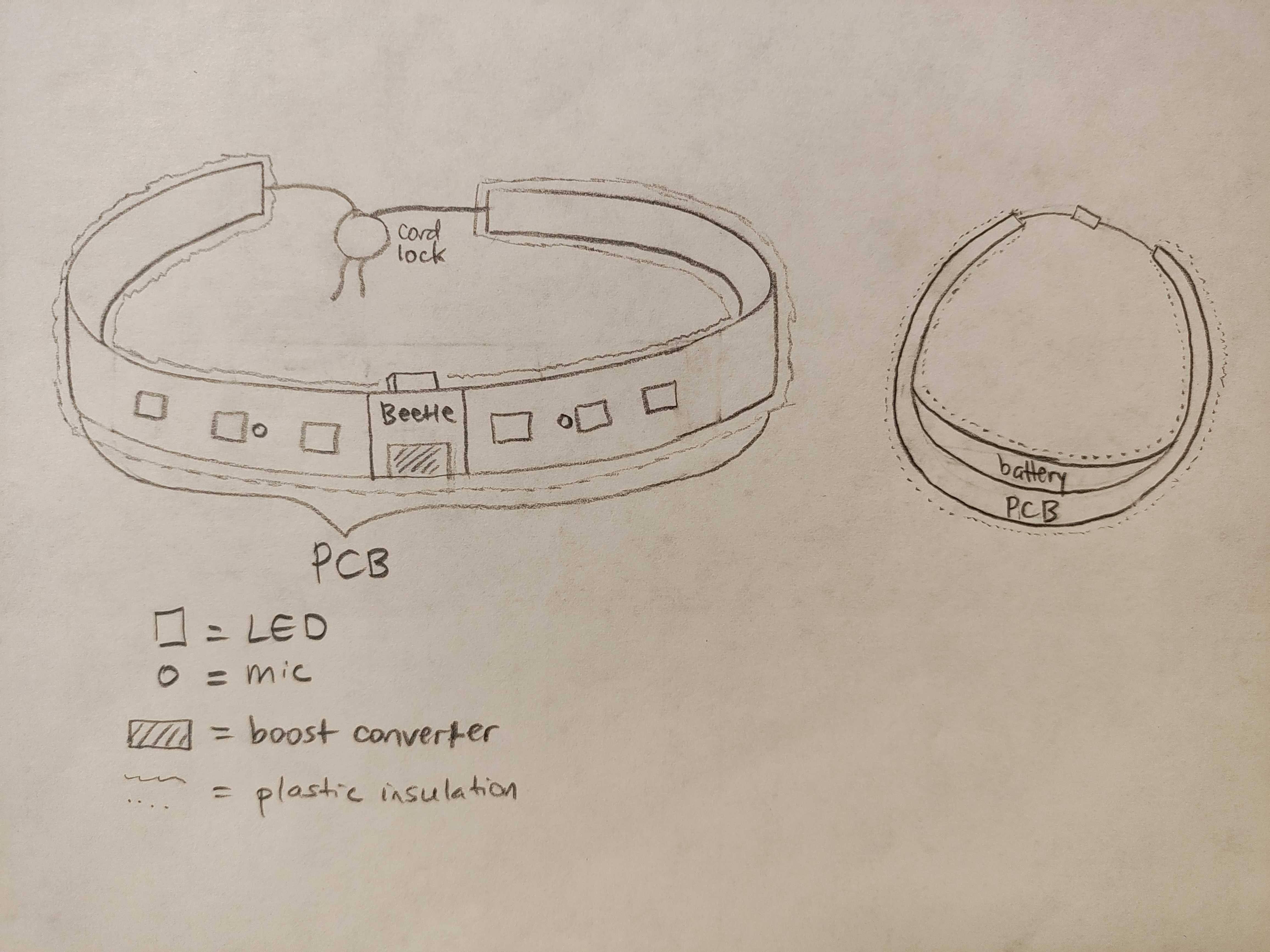
Here is a sketch of the bracelet that was not included in the design report.
All deliverables from last week are complete. The Gantt chart has been updated so that we can catch up to the new schedule.
When first attempting to use the code, I was able to see the device on my phone and click to establish a connection; however, an SMP error occurred shortly afterwards. For next week, I want to implement the Beetle-Bluetooth connection described in the tutorial without errors, and be able to maintain a Bluetooth connection between the Beetle and my phone.

The timing of the next deliverables on the Gantt chart depends on when the PCB comes in; after that, I can work on electronic prototyping and LED signal processing. I will also write non-code algorithms for how determining direction from a microphone will work (with the inputs being two microphone input values in dB).