

This week was very productive. With Seaver and Erik back from their swim meet we were able to meet up and really iron out some of the details of our design. We went ahead and selected a pressure sensor for the hole, an RFID sensor and tag for the ball, a bluetooth enabled IMU for the ball, and the LiDAR sensor to detect the balls distance.
I primarily spent the week messing with the LiDAR sensor. First thing was finding a suitable library to control the sensor. After messing with the poorly documented one on the manufacturers website, I found another implementation that was much easier to understand and was written in Python which I personally enjoy better than C++. After some messing around I was able to have the LiDAR scan across an entire room and scan with a golf ball in it’s field of view. The next challenge was slowing down the motor, this sensor comes with a USB chip to control it, however, the chip sets the spin rate of the LiDAR sensor to a set rate. This rate does not allow for the angular resolution that we are looking for and need to properly detect a golf ball. To get around this, I used an Arduino to highjack the PWM MOTOR_SPEED control pin and was able to slow down the spin rate successfully.
From there, I began to write some code to try and detect the ball edges. Below is a photo of the LiDAR output. I was able to write a ball detection program that highlights the ball in red. For a standard golf ball, this worked up to 10 feet away which is within our requirements. 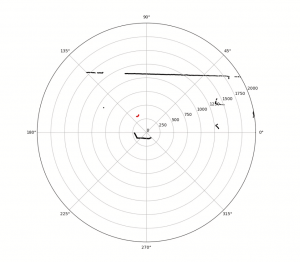
Our project is on track and we are expecting the rest of our sensors next week. From there, we are going to test each individual component. Next week we hope to have developed a prototype of the hole and proper distance measurements. Once these have been completed we will move into designing and building the golf hole.