
This week I started on distributed pathfinding, only paying attention to packets received by immediate neighbors of each node. This ended up essentially being an entire rewrite of the pathfinding code that I currently have, and therefore it has taken longer than expected to get it finalized. Rather than actually calling code to run Dijkstra’s algorithm or A*, each node is instead waiting for a response from any of its neighbors, to see if one has a path to an exit, and if so, what the distance is to it. When it receives such a response, it will note down the weight to this exit and broadcast that information to any of its neighbors. If the node receives a new shortest path, or information that the current shortest path is not invalid, it will update the path it is taking, and forward that information onward.
I also modeled a very basic idea of what I think our demo room should look like:
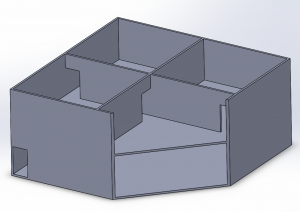
(this is a section view of the model)
I thought this was a decent model because it was two stories, has multiple rooms on one floor, multiple exits – there is one on the back of the model as well – and has room for 5+ nodes; it seems like this model would allow us to demonstrate a lot of the functionality of our project during the demo. This should be simple enough to make, as I have access to a significant amount of leftover material – including fasteners and tools – now that booth has been completed and torn down.
I also worked on finally getting the display integrated with the current pathfinding implementation that I have. Aidan and I have been talking about this integration for quite a while at this point, but I finally sat down and got it working. This was a relatively small integration, as all the code was already written, I just needed to import his helper function files into my code and call them; while it was a relatively small amount of effort to integrate these portions, it does represent a big step, as it officially confirms that we are able to link the pathfinding code and the display code.
The final thing that I worked on this week was the final presentation. I am going to be the one presenting this time, so I have been spending time going through the presentation requirements making sure that we address all that we need to. I have also been touching up the diagrams that we have, and reviewing the feedback that we have received from the other presentations. Finally, I have begun rehearsal so that I am calm and confident when presenting. I am also trying to ensure that I don’t rely too heavily on talking about where we would like to be in a week, but focusing on where the project is currently and the progress that we have made.
I am slightly behind pace according to the Gantt chart tasks I have for myself, as I was scheduled to have distributed pathfinding completed by this point. While the current pathfinding implementation is perfectly suitable for a demo and final presentation, we wanted to implement the distributed pathfinding approach, as it is much more scalable for a real-world system; it significantly reduces the computation done on each node, and greatly reduces the range as each node only needs information from its neighbors, and not every other node in the network. The primary reason we wanted to test it is because of the concerns with added latency. While I don’t believe I will have this implemented by the Final presentation on Monday, I do believe that I will have the time to get this completed by the final demo occurring during finals week.
Next week, I want to finalize the distributed pathfinding and test it against the normal pathfinding. I also am going to work with Aidan and Neha integrating the hardware components, and soldering all the parts to the PCBs that are currently being manufactured. I will also be working on getting the video submission, and poster finalized, and building the test building that we will be using for our final demo.