Significant Risks
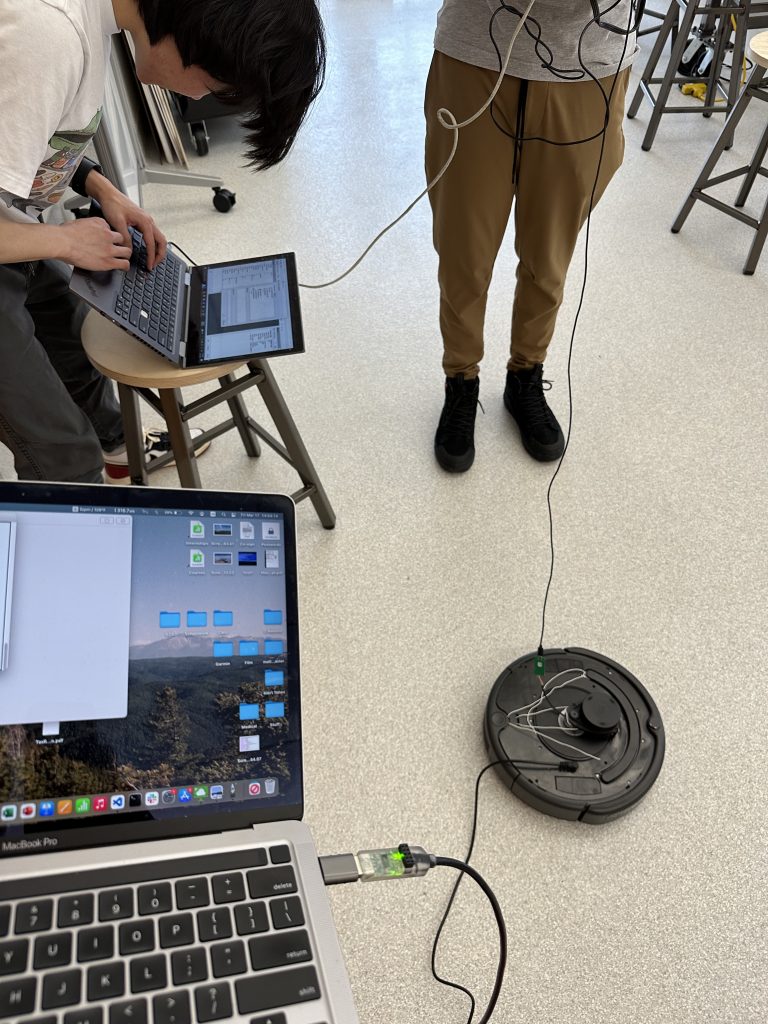
- Battery life: we’re currently not seeing the expected longevity from the single pack, so may have to go to 2 packs in parallel
- Navigation Stack compiles and runs, moving on to tuning configuration parameters and sensor data for more accurate results with path planning and movement
Design Changes
- None to report on hardware side
- We have updated the Roomba library and changed the serial baud rate. This has enabled the odom topic in ROS. Seems to be good enough to get basic path planning working, but needs more testing.
Schedule/PM
- Slightly behind on test/integration, will be making use of 2 week slack time
We do have some photos to add, but sadly wordpress isn’t allowing uploads 🙁